TRD-P. PROIECTAREA
TRANSMISIILOR CU ROŢI DINŢATE
TRD-P.1
REDUCTOARE DE TURAŢIE CU AXE FIXE
TRD-P.1.2 REDUCTOARE DE TURAŢIE
CONICO-CILINDRICE
|
CUPRINS |
|
TRD-P.1.2.1 DATE DE PROIECTARE TRD-P.1.2.2 ALEGEREA MATERIALELOR, TRATAMENTELOR
TERMICE ŞI TEHNOLOGIILOR TRD-P.1.2.3 ALEGEREA PARAMETRILOR FUNCŢIONALI
ŞI CONSTRUCTIVI TRD-P.1.2.4 PREDIMENSIONAREA ANGRENAJELOR ŞI ARBORILOR. SCHEMA CINEMATICĂ TRD-P.1.2.4.1 PREDIMENSIONAREA ANGRENAJULUI CONIC TRD-P.1.2.4.2 PREDIMENSIONAREA ANGRENAJULUI CILINDRIC TRD-P.1.2.4.3 SCHEMA CINEMATICĂ TRD-P.1.2.5 VERIFICAREA (DIMENSIONAREA) ANGRENAJELOR TRD-P.1.2.5.1 VERIFICAREA (DIMENSIONAREA) ANGRENAJULUI CONIC TRD-P.1.2.5.2 VERIFICAREA (DIMENSIONAREA) ANGRENAJULUI CILINDRIC TRD-P.1.2.6 PROIECTAREA DE ANSAMBLU TRD-P.1.2.6.1 PROIECTAREA FORMELOR ROŢILOR TRD-P.1.2.6.2 PRECONFIGURAREA ARBORILOR ŞI ALEGEREA RULMENŢILOR ŞI MONTAJELOR ACESTORA TRD-P.1.2.6.3 ÎNTOCMIREA DESENULUI DE ANSAMBLU. SECŢIUNEA PTRINCIPALĂ TRD-P.1.2.7 CALCULUL ARBORILOR TRD-P.1.2.7.1 SCHEMELE DE CALCUL ALE ARBORILOR TRD-P.1.2.7.2 VERIFICAREA (DIMENSIONAREA) ARBORILOR TRD-P.1.2.8 CALCULUL RULMENŢILOR TRD-P.1.2.9 CALCULUL ASAMBLĂRILOR ARBORE-BUTUC TRD-P.1.2.10 PROIECTAREA CARCASELOR TRD-P.1.2.11 PROIECTAREA SUBSISTEMELOR DE UNGERE ŞI ETANŞARE TRD-P.1.2.11.1 Proiectarea subsistemului de ungere TRD-P.1.2.11.2 Proiectarea subsistemului de etanşare TRD-P.1.2.12 DESEN DE ANSAMBLU FINAL. ELABORARE DOCUMENTAŢIE TEHNICĂ TRD-P.1.2.13 PROIECTAREA CONSTRUCTIVĂ DE DETALIU. DESENE DE EXECUŢIE |
TRD-P.1.2.1 DATE DE PROIECTARE
Parcurgerea metodologiei de mai jos, conform STAS 1163, pentru cazuri concrete se va face cu memorarea temporară a valorilor principalilor parametri de proiectare în lista TCR-L.1
Tab.
TRD-P.1.2.1.2 Definirea problemei generale de proiectare a unui
reductor conico-cilindric
|
a.
Turaţia la intrare, ni
[rot/min] b.
Puterea
la intrare, Pi [kW] şi din
c.
Raportul
de transmitere total, iR. d.
Tipurile şi numerele de angrenaje pe trepte: conic ortogonal cu dantură dreaptă sau
curbă; cilindric cu dantură dreaptă sau înclinată e. Durata de funcţionare, Lh. f.
Parametri
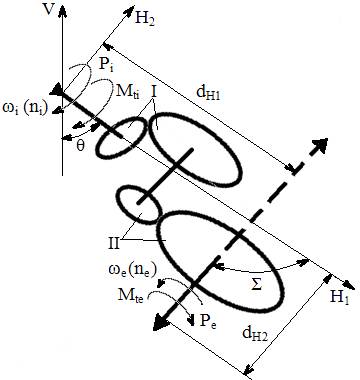
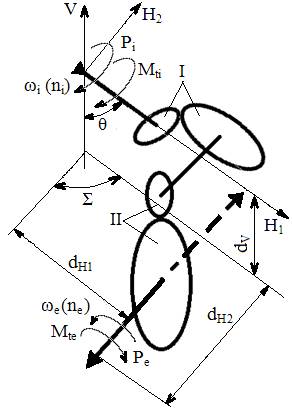
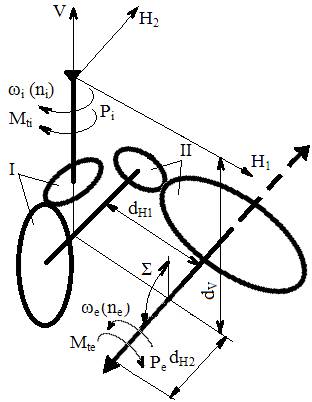
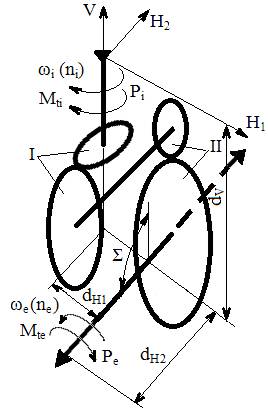
geometrici de poziţionare a intrării şi ieşirii (fig.
TRD-P.1.2.1.2,
TRD-P.1.2.1.3)
raportaţi la sistemul de coordonate H1H2V
cu centrul asociat intrării şi cu axele H1,2 în plan
orizontal şi V direcţia verticală: poziţionare
unghiulară: θ – unghiul direcţiei de intrare în raport cu
axa V, φ – unghiul
proiecţiei direcţiei de intrare în raport axa H1;
Σ – unghiul dintre direcţiile de intrare şi ieşire; poziţionare
spaţială (opţional): dH1, dH2, dV – coordonatele ieşirii în raport cu
intrarea (sistemul H1H2V). g.
Condiţii de funcţionare: tipul maşinii (utilajului) în care se
integrează, tipul încărcării exterioare (constantă,
alternativă, cu şocuri etc.), tipul motorului de acţionare,
nivel de vibraţii şi zgomot, caracteristicile mediului în care funcţioneză) h.
Condiţii constructive: cu ieşire pe o
parte, cu ieşire pe ambele părţi, cu arborele de ieşire
plin, cu arborele de ieşire tubular i. Condiţii ecologice (utilizarea de materiale şi tehnologii eco, reciclarea materialelor, protecţia vieţii); volum minim; greutate minimă |
|
Obs. Reductoarele cilindrice au raportul de transmitere i = 8…40 |
|
|
|
|
|
|
a |
b |
c |
d |
|
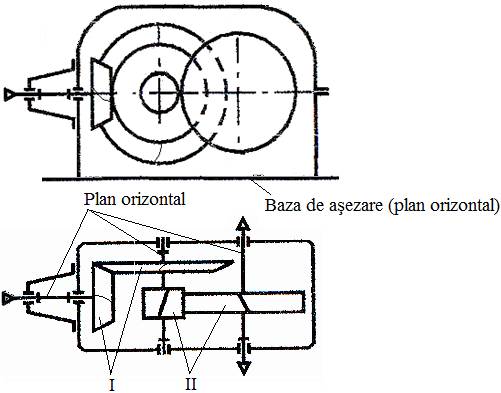
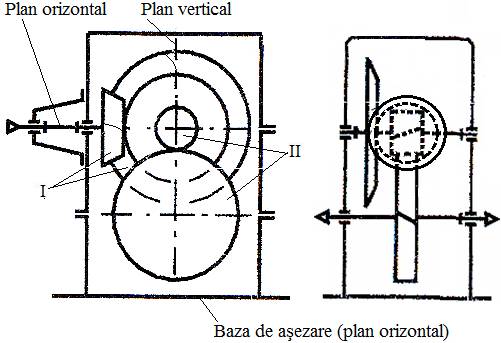
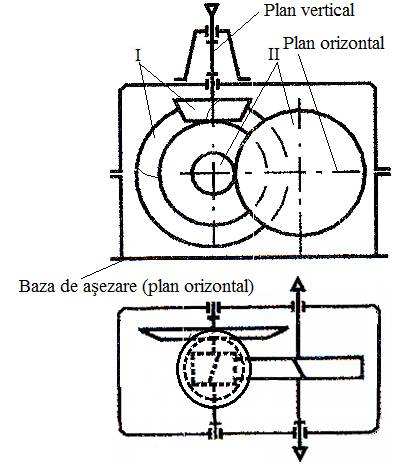
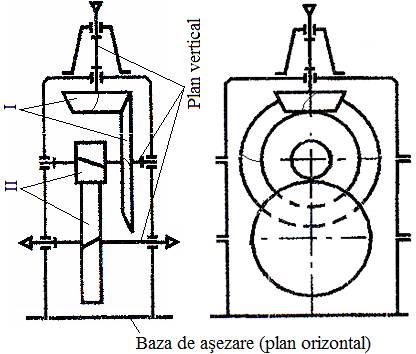
Fig. TRD-P.1.2.1.2 Schemele poziţiilor relative ale intrărilor şi ieşirilor reductoarelor conico-cilinrice ortogonale (Σ =90o, φ=0o): a – orizontal (θ =90o, dV =0); b - orizontal-vertical (θ =90o, dV ≠0); c - vertical-orizontal (θ =0o, dH1 ≠0); d - vertical (θ =0o, dH1 =0) |
|||
|
|
|
|
a |
b |
|
|
|
|
c |
d |
|
Fig. TRD-P.1.2.1.3 Schemle cinematice ale reductoarelor conico-cilinrice ortogonale (Σ =90o, φ=0o): a – orizontal (θ =90o, dV =0); b - orizontal-vertical (θ =90o, dV ≠0); c - vertical-orizontal (θ =0o, dH1 ≠0); d - vertical (θ =0o, dH1 =0) |
|
TRD-P.1.2.2 ALEGEREA MATERIALELOR, TRATAMENTELOR
TERMICE ŞI TEHNOLOGIILOR
Principalele materiale folosite în construcţia roţilor dinţate sunt: oţelurile, fontele, unele aliaje neferoase şi materialele plastice.
Pentru
construcţia roţilor dinţate ale reductoarelor se utilizează, cu
precădere, oţelurile, în general, la alegerea tipului trebuie să
se aibă în
vedere următoarele aspecte:
- tipul angrenajului şi destinaţia
acestuia;
- condiţiile de exploatare (mărimea
şi tipul încărcării, mărimea
- tehnologia de execuţie agreată;
- restricţiile impuse prin gabarit,
durabilitate şi preţ de fabricaţie.
În funcţie de
modul de solicitare se recomandă următoarele materiale:
- pentru angrenaje puternic solicitate şi
viteze periferice v∈ (3...12) m/s: oţeluri
aliate de cementare (21MoMnCr12; 15MoMnCr12; 13Cr08; 21TiMnCr12;
18MoCr10), cementate în adâncime min.1,5 mm şi călite la (58...62) HRC pe
suprafaţă şi (30...40) HRC în miez;
- pentru angrenaje mediu solicitate şi
viteze periferice v
∈ (4…..8) m/s: oţeluri
carbon de calitate (OLC 35; OLC 45; OLC 60) şi oţeluri aliate (35CrMnSi13; 40Cr10;
41MoCr11) îmbunătăţite. Pentru viteze v∈ (8...12) m/s: oţeluri
carbon de calitate şi aliate (OLC 35; OLC 45; 40Cr10; 41MoCr11)
îmbunătăţite
la 30...35 HRC şi călite superficial la 50...55 HRC.
- pentru angrenaje slab solicitate şi
viteze periferice v∈ (6...12) m/s: oţeluri carbon
de cementare (OLC 10; OLC 15) cementate pe o adâncime de (0,6...1) mm şi
călite la (50...60) HRC pe suprafaţă. Pentru v < 6 m/s:
oţeluri carbon de calitate
(OLC 35; OLC 45; OLC 60) şi oţeluri aliate (40Cr10; 35 Mn16; 27MnSi12;
31CrMnSi10; 35CrMnSi13) îmbunătăţite la (20...25) HRC.
- pentru angrenaje foarte slab solicitate,
indiferent de viteză: oţeluri carbon obişnuite
netratate (OL42; OL50; OL60; OL70), oţeluri turnate (OT45;
OT50), fontă turnată (Fgn600; Fgn700), textolit.
Practic, în funcţie de valoarea încărcării, momentul de torsiune la intrare, se recomnadă:
- Mti < 30000...40000 Nmm se va adopta pentru roţile angrenajelor oţel de îmbunătăţare;
- Mti > 30000...40000 Nmm se va adopta pentru roţile angrenajelor oţel de cementare.
Materiale pentru carcase Carcasele, datorită
faptului că criteriul de rigiditate mărită este dominant, se
execută în special din fontă (Fc 150, Fc 200, Fc 250) sau oţel
turnat (OT45, OT55). Când se impune greutate redusă carcasele se pot executa
din aluminiu turnat. În cazul producţiei de unicate
sau de serie mică carcasele se pot executa în construcţie sudată din materiale
cu proprietăţi de sudare (OL37, OL42, OL44)
TRD-P.1.2.3 CALCULUL PARAMETRILOR FUNCŢIONALI
ŞI CONSTRUCTIVI
|
Fig. TRD-P.1.2.1.2 Schema structurală generală a reductorului conico-cilindric |
Elemente
şi subansamble constructive |
|
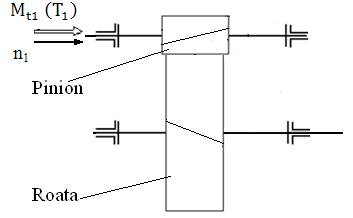
Angrenaje:
- treapta I – angrenaj conic
cu dantură curbă cu raportul de transmitere iI
: 1I – pinion conic, 2I – roată conică; - treapta a-II a– angrenaj cilindic cu
dantură înclinată cu raportul de transmitere iII
: 1II – pinion cilindric, 2II
– roată cilindrică; Arbori: A1 – arborele de intrare, A2
– arborele intermediar, A3 – arborele de ieşire Lagăre:
Subansamble:
SC
– subasamblul carcasă; |
|
|
Tipurile
angrenajelor |
|
|
Treapta
I: angrenaj conic ortogonal cu dantură dreaptă sau curbă
Treapta
a II-a: angrenaj cilindric ortogonal cu dantură dreaptă sau
înclinată |
|
|
Raportele de transmitere pe trepte |
|
|
Raportul de transmitere al treptei I (angrenajul conic) iI = 0,25 iR iI < 3,55, (pentru angrenajele conice cu dantură dreaptă) [Jula, 1985; Moldovean, 2002] Raportul
de transmitere al treptei a II-a (angrenajul cilindric), iII = iR/ iI |
|
|
Turaţiile,
puterile şi momentele de torsiune ale arborilor |
|
|
Arborele A1: n1 = ni [rot/min]; P1
= Pi
[kW],
Mt1 = Mti [Nmm]; Arborele A2: n2 = n1/iI [rot/min]; P2 = P1 ηI [kW]; Mt2 = Mt1 iI ηI [Nmm]; Arborele A3: n3 = n2/iII = n1/(iI iII) = n1/iR [rot/min] ; P3 = P2 ηII = P1 ηI ηII = P1 ηR [kW]; Mt3 = Mt2 iII ηII = Mt1 iI iII ηI ηII = Mt1 iR ηR [Nmm] |
|
|
Obs. 1.
Treapta
conică se foloseşte totdeauna ca treaptă rapidă,
angrenajele conice având o capacitate de încărcare mai mică decât
cele cilindrice la acelaşi gabarit. 2. Randamentele angrenajelor cilindrice şi conice ηcil = 0,96...0,98 şi respectiv, ηcon = 0,95...0,97 |
|



TRD-P.1.2.4 PREDIMENSIONAREA ANGRENAJELOR ŞI ARBORILOR . SCHEMA CINEMATICĂ
TRD-P.1.2.4.1 PREDIMENSIONAREA ANGRENAJULUI CONIC
Tab.
AEV-P.1.2.4.1 Definirea problemei de proiectare a angrenajului conic ortogonal ( I)
|
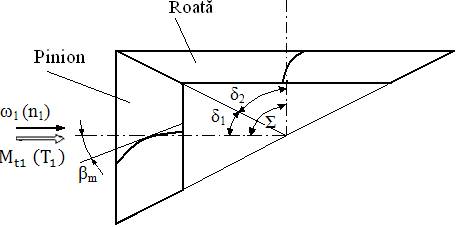
Fig. AEV-P.2.1 Schema funcţională a angrenajului conic ortogonal |
Date iniţiale |
|
a.
Turaţia la intrare (pinion), n1
[rot/min]. b. Momentul de torsiune la intrare (pinion), Mt1 (T1) = Mt1 [Nmm] c.
Raportul de angrenare, u = iI. d.
Unghiul dintre axele roţilor, Σ = 90o şi se determină semiunghiurile, e.
Numărul de angrenaje identice în paralel, χ =1. f.
Durata de funcţionare, Lh [ ore ]. g.
Tipul danturii: curbă h.
Condiţii de funcţionare: tipul maşinii motoare, tipul instalaţiei
antrenate, temperatura, caracteristicile mediului în care funcționează
(umiditate, variaţii de temperatură, poluare cu praf,
impurităţi etc.). i.
Condiţii ecologice: utilizarea de materiale şi tehnologii eco, reciclarea materialelor, protecţia vieţii. |
Obs. Pentru roţile angrenajului se va adopta materialul ales în subcap. TRD-P.1.2.2.
Tab.
AEV-P.1.2.4.2
|
|
a |
b |
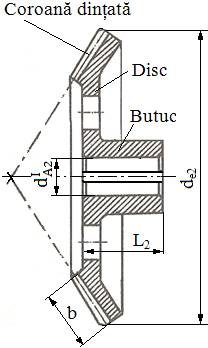
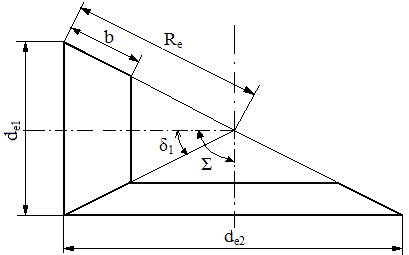
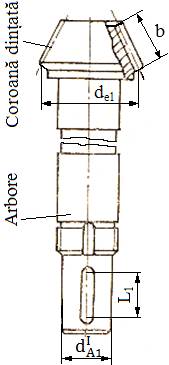
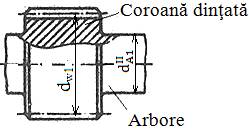
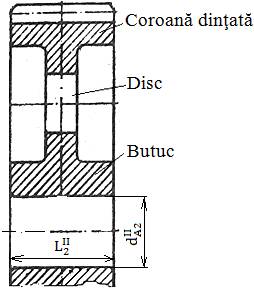
Date despre materilal: - marca; - caracteristici mecanice, rezistenţele la rupere şi la curgere σr [MPa0, σ02 [MPa]; - tratament termic şi durităţile. Date despre angrenaj: - modulul frontal exterior me [mm]; - diametrele cercurilor de divizare exterioare de1,2 [mm], de1,2 [mm]; - lungimea generatoarei conului exterior Re [mm]; - lăţimea danturii b [mm] Date despre roţi: - pinionul, de obicei la reductoare conice, are gabaritulradial redus şi este corp comun cu arborele; - roata are dimensiuni radiale mari şi, de obicei, se poate are trei zone: coroană dinţată, disc (cu sua fără găuri de uşurare) şi butuc Date despre arbori: - diametrul arborelui pinionului din predimensionare,
- diametrul arborelui roţii din predimensionare
|
|
Fig. AEV-P.1.2.4.1
Schema cinematică a
angrenajului conic |
Fig. AEV-P.1.2.4.2 Formele
roţilor dinţate conice: a
– pinion corp comun cu arborele; b – roată |
||
Definirea problemei de proiectare a
angrenajului cilindric (II)
|
Fig. AEV-P.1.1 Schemă funcţională a angrenajului
cilindric |
Date iniţiale |
|
a.
Turaţia la intrare (pinion), n1
= n2 [rot/min]. b. Momentul de torsiune la intrare (pinion), Mt1 (T1) = Mt2 [Nmm] c.
Raportul
de angrenare, u = iII . d.
Durata
de funcţionare, Lh [ore]. e.
Numărul
de angrenaje identice în paralel,
χ = 1. f.
Tipul
danturii danturii: înclinată. g.
Parametri
geometrici impuşi
(opţional): standardizarea distanţei dintre axe; h.
Condiţii
de funcţionare: tipul
transmisiei în care se integrează, tipul maşinii motoare, tipul
instalaţiei antrenate, temperatura de lucru, caracteristicile mediului
în care funcționează). i. Condiţii ecologice (utilizarea de materiale şi tehnologii eco, reciclarea materialelor, protecţia vieţii) |
Tab. AEV-P.1.3.3 Schema cinematică. Formele pinionului şi roţii cilindrice
|
|
|
|
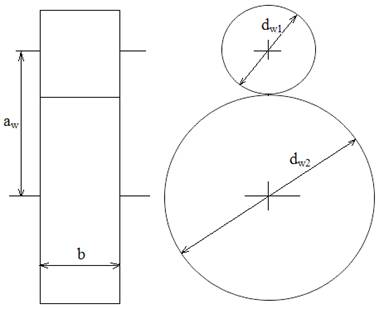
Date despre materilal: - marca; - caracteristici mecanice, rezistenţele la rupere şi la curgere σr [MPa0, σ02 [MPa]; - tratamentul termic şi durităţile; Date despre angrenaj: - tipul danturii; - unghiul de înclinare a danturii β [o]; - numerele de dinţi z1, z2; - factorii deplasărilor xn1, xn2; - modulul normal mn [mm]; - diametrele cercurilor de rostogolire exterioare dw1 [mm], dw2 [mm]; - lăţimea danturii b [mm] Date despre formele roţilor: - pinionul; - roata; Date despre arbori: - diametrul arborelui pinionului din predimensionare,
- diametrul arborelui roţii din predimensionare |
|
a |
b |
||
|
Fig. TRD-P.1.3.1 Schemă cinematică a angrenajului cilindric
|
Fig. TRD-P.1.3.2 Formele roţilor dinţate cilindrice: a – pinionul, corp comun cu arborele intermediar; b – roata |
||
TRD-P.1.2.4.3 SCHEMA CINEMATICĂ
Schema cinematică a reductorului conic se realizează la scara 1:1 şi oferă o imagine grafică de ansamblu a viitorului reductor (fig. TRD-P.1.2.4.3.1). Deoarece, de obicei, la proiectare numărul parametrilor independenţi este mult mărit în raport cu numărul relaţiilor de calcul este dificil să se obţină o structură optimă (volum şi greutate minime), în practică se face o analiză a schemei cinematice conform tab. TRD-P.1.2.4.3.1, urmărind optimizarea calitativă pentru eliminarea, pe de-o parte, a situaţiilor iraţionale şi/sau imposibile tehnic şi, pe de altă parte, o proporţionare judicioasă care să conducă la un volum minim.
|
|
|
Fig. TRD-P.1.2.4.3.1 Schema cinematică personalizată a reductorului conico-cilindric |
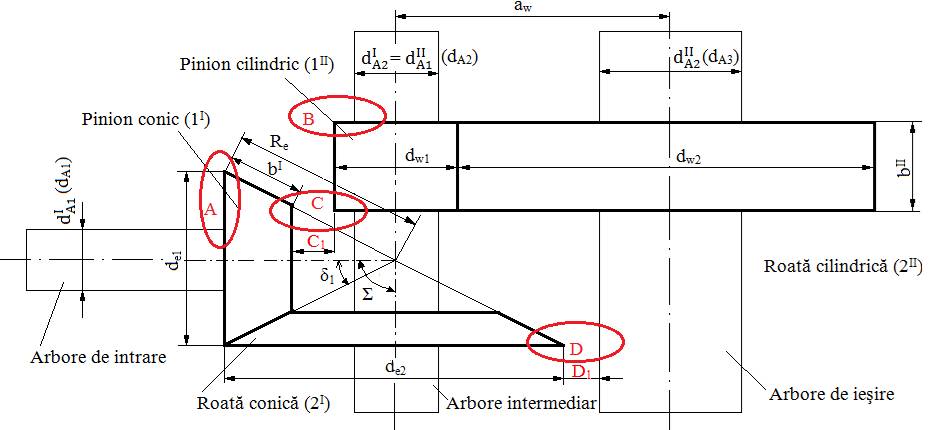
Tab. TRD-P.1.2.4.3.1 Aspecte de urmărit pentru optimizarea calitativă a schemei cinematice
|
Zona (fig. TRD-P.1.2.4.3.1 |
Situaţia posibilă |
Incovenientul |
Remedierea incovenientului prin calcul |
Soluţia constructivă |
|
A |
de1 << dA1 |
Structura arbore-pinion conic iraţională tehnic |
Se vor verifica şi/sau modifica calculele de predimensionare ale arborlui de intrare şi angrenajului (posibil şi cu realegerea materialelor sau/şi tratamentelor termice) |
- |
|
de1
|
- |
- |
Pinionul se va executa corp comun cu arborele |
|
|
de1 >> dA1 |
La diferenţe mult mărite structura reductorului poate fi neoptimă |
Se va modifica împărţirea raportului de transmitere total pe trepte (raportul de transmitere al treptei I se va micşora) şi se vor reface calculele de predimensionare |
Pinionul se va executa ca element separat |
|
|
B |
dw1 << dA2 |
Structura arbore-pinion cilindric iraţională tehnic |
Se vor verifica şi/sau modifica calculele de predimensionare ale arborlui şi angrenajului (posibil şi cu realegerea materialelor sau/şi tratamentelor termice) |
- |
|
dw1
|
- |
- |
Pinionul se va executa corp comun cu arborele |
|
|
dw1 >> dA2 |
La diferenţe mult mărite structura reductorului poate fi neoptimă |
Se va modifica împărţirea raportului de transmitere total pe trepte (raportul de transmitere al treptei I se va mări) şi se vor reface calculele de predimensionare |
Pinionul se va executa ca element separat |
|
|
C |
C1
|
Cele două pinioane interferă |
- |
|
|
D |
D1
|
Roata conică interferă cu arborele de ieşire |
Se va modifica împărţirea raportului de transmitere total pe trepte (raportul de transmitere al treptei I se va micşora) şi se vor reface calculele de predimensionare |
- |
|
D1 >> 0 |
Structură neoptimă a reductorului (dimensiunea D1 prea mare) |
Se va modifica împărţirea raportului de transmitere total pe trepte (raportul de transmitere al treptei I se va mări) şi se vor reface calculele de predimensionare |
- |
TRD-P.1.2.5 VERIFICAREA (DIMENSIONAREA) ANGRENAJELOR
TRD-P.1.2.5.1 VERIFICAREA (DIMENSIONAREA) ANGRENAJULUI CONIC
Verificarea angrenajului conic predimensionat mai sus şi, eventual,
dimensionarea acestuia (în cazul în care calculul de verificare nu este
îndeplinit) se va face prin continarea parcurgerii algoritmului din cap.
AEV-P.2 subcap. AEV-P.2.4
- elementele geometrice de proiectare constructivă şi tehnologică, (fig. TRD-A.1.2.5.1.1);
- viteza periferică în polul angrenării din secţiunea mediană;
- treapta de precizie asociată procedeului de prelucrare;
- rugozităţile flancurilor active şi suprafeţelor de racordare;
- tipul lubrifiantului şi vâscozitatea;
- durităţile flancurilor şi miezului dinţilor roţilor, tensiunile maxime de contact şi încovoiere, factorii de siguranţă la cele două solicitări (contact şi încovoiere);
- forţele din angrenaj (fig. TRD-A.1.2.5.1.2).
|
|
|
a |
|
|
|
b |
|
Fig. TRD-P.1.2.5.1.1 Elemente geometrice ale angrenajului conic şi roţilor acestua pentru proiectare: a – date de intrare; b – rezultate |

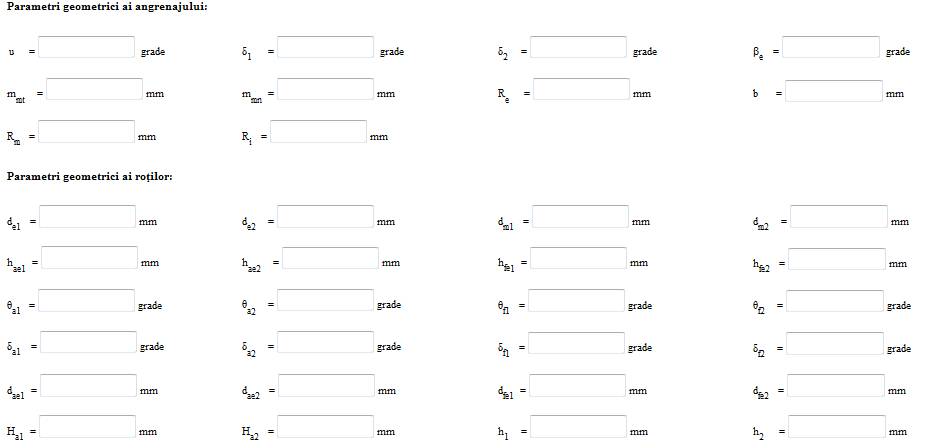
|
|
|
Fig. TRD-P.1.2.5.1.2 Date de intrare şi rezultate pentru calculul forţelor din angrenajul conic (se va calcula pentru cele două sensuri de rotaţie) |
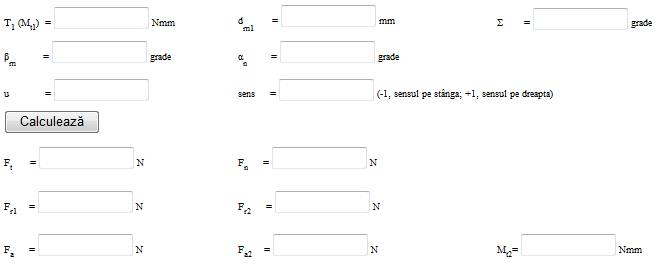
În final, se va face verificarea angrenajului conic cu pachetul MDESIGN (v. subcap. AEV-A.2.1.6, pentru un angrenaj conic cu dantură dreaptă).
TRD-P.1.2.5.2 VERIFICAREA (DIMENSIONAREA) ANGRENAJULUI CILINDRIC
Verificarea angrenajului cilindric
predimensionat mai sus şi, eventual, dimensionarea acestuia (în cazul în care
calculul de verificare nu este îndeplinit) se va face prin continarea
parcurgerii algoritmului din cap. AEV-P.1, subcap.
AEV-P.1.4
- elementele geometrice de proiectare constructivă şi tehnologică, (fig. TRD-A.1.2.5.2.1);
- viteza periferică în polul angrenării;
- treapta de precizie asociată procedeului de prelucrare;
- rugozităţile flancurilor active şi suprafeţelor de racordare;
- tipul lubrifiantului şi vâscozitatea;
- durităţile flancurilor şi miezului dinţilor roţilor, tensiunile maxime de contact şi de încovoiere, factorii de siguranţă la cele două solicitări (contact şi încovoiere);
- forţele din angrenaj (fig. TRD-A.1.2.5.1.2).
|
|
|
a |
|
|
|
b |
|
Fig. TRD-P.1.2.5.2.1 Elemente geometrice ale angrenajului cilindric şi roţilor acestua pentru proiectare: a – date de intrare; b – rezultate |

|
|
|
Fig. TRD-P.1.2.5.2.2 Date de intrare şi rezultate pentru calculul forţelor din angrenajul cilindric |
În final, se va face verificarea angrenajului conic cu pachetul MDESIGN (v. subcap. AEV-A.1.1.6, pentru angrenaje cilindrice cu distanţa dintre axe neimpusă).
TRD-P.1.2.6 PROIECTAREA DE ANSAMBLU
Proiectarea de ansamblu, în general, presupune activităţi succesive de concepţie şi/sau adoptare soluţii constructive, de calcul (predimensionare, dimensionare şi/verificare) şi de reprezentare grafică în desenul de ansamblu. Astfel, desenul de ansamblu (de obicei, realizat la scară) în evoluţie spre forma finală sintetizează grafic toate rezulzatele anterioare şi devine sursă de date pentru etapele viitoare.
Pentru cazul proiectării desenului de ansamblu al reductorului conico-cilindric la această etapă se impune configurarea (modelarea) 3D a elementelor care sintetizează grafic calculele şi soluţiile anterioare. La elaborarea modelelor 3D se vor adopta formele cvasifinale ale roţilor dinţate, arborilor, rulmenţilor şi a unor părţi ale unor elemente auxiliare (distanţiere, carcase, elemente de asamblare etc.).
Pentru modelarea grafică în mediul CATIA, parcurgând etapele de mai jos, se vor urmări documentele suport postate la adresa Documentaţie pentru modelare grafică în CATIA (se va parcurge etapele indicate în fişierul Algoritmul de modelare reductor.docx).
TRD-P.1.2.6.1 PROIECTAREA FORMELOR ROŢILOR
Aspecte generale privind proiectarea formelor roţilor dinţate cilindrice şi conice sunt prezentate în cap. AEV-P.1 (sucap. AEV-P.1.3.2, tab. AEV-P.1.3.2.2) şi sucap. AEV-P.1.5) şi, respectiv, AEV-P.2 (sucap. AEV-P.2.3.2 tab. AEV-P.2.3.2.2 şi sucap. AEV-P.2.5).
TRD-P.1.2.6.2 PRECONFIGURAREA ARBORILOR ŞI ALEGEREA RULMENŢILOR ŞI MONTAJELOR ACESTORA
Deoarece în cazul reductoarelor de uz general dimensiunile capetelor arborilor de intrare şi de ieşire (fig. TRD-P.1.2.6.2.1,a,c) trebuie să asigure interschimbabilitatea elementelor (roţi de curea, roţi dinţate etc.) şi subansamblelor (cuplaje) care se montează pe acestea se impune considerarea paramatrilor acestora (diametrul şi lungimea) conform STAS8724/2 (v. fer. ARD-P.5)
Arborii reductoarelor de turaţie au, în general, diametre mari şi lungimi între reazeme mici (raportul l/d < 10) şi deci, deoarece au rigiditate flexională (la încovoiere) mărită au şi deformaţii elastice (rotiri) în reazeme (lagăre) reduse. Ca urmare, de obicei, se folosesc rulmenţi radiali cu bile şi/sau a celor cu role (conice sau cilindrice).
Deşi încărcările (forţele radiale şi axiale) sunt diferite, frecvent, din considerente de tehnologicitate se adoptă pentru lagărele arborilor rulmenţi identici care conduc la alezaje identice în carcasă mai uşor de executat decât dacă s-ar fi considert cu diametre diferite.
|
|
|
|
|
a |
b |
c |
|
Fig. TRD-P.1.2.6.2.1 Preconfigurarea arborilor: a – de intrare; b – intermediar; c – de ieşire |
||
Pentru lagărele arborilor pe care sunt montate roţi cu dantură cilindrică caz în care, teoretic, apar forţe axiale reduse se pot adopta lagăre cu rulmenţi radiali cu bile (fer. RUL-P.1.1) sau cu role cilindrice (fig. TRD-P.1.2.6.2.1,c). În cazul în care dantura este înclinată cu valori mărite ale unghiului β se pot adopta şi rulmenţi radial-axiali cu bile.
În cazul lagărelor arborilor pe care se montează roţi dinţate conice se adoptă, ţinând cont de încărcarea axială, rumenţi radial-axiali cu bile (fer. RUL-P.1.2) sau, la forţe axiale mai mari, cu role conice (fer. RUL-P.1.3). Aceşti rulmenţi preiau forţele axiale mari respectiv foarte mari în ambele sensuri fiind montaţi câte unul în fiecare lagăr (fig. TRD-P.1.2.6.3.1,a pentru rulmenţi radiali axiali cu cu bile; fig. TRD-P.1.2.6.3.1,b pentru rulmenţi radiali axiali cu role conice) sau amândoi într-un lagăr caz ce implică ca celălat lagăr să includă un rulment radial (fig. TRD-P.1.2.6.3.1,c). În ambele situaţii cei doi rulmenţi radial-axiali formează montaje în X sau în O (v. cap. RUL-T, tab. RUL-T.4.10) În cazul montării în consolă a pinioanelor conice puternic încărcate se impune o construcţie mai robustă pentru lagărul din aproprierea pinionului (fig. TRD-P.1.2.6.3.1,c) deoarece acesta este încărcat cu forţe radiale mai mari.
Montajele cu rulmenţi trebuie să realizeze fixarea radială şi axială în ambele sensuri fără a induce forţe suplimentare în rulmenţi, să permită dilataţiile termice în cazul variaţiilor mari de temperatură şi să permită reglarea cu uşurinţă a jocurilor din rulmenţi şi a angrenajelor.
Recomandări de alegere a dimensiunii de montaj a rulmenţilor (d, diametrul alezajului): dR1,3 > dA1,3 + (8...12) mm, pentru arborii de intrare şi de ieşire (tronsoanele de sub rulmenţi sunt solicitate la torsiune şi momentele de încovoiere pot fi mărite), dR2 ≤ dA2, pentru arborle intermediar (tronsoanele de sub rulmenţi nu sunt solicitate de momentul de torsiune şi momentele de încovoiere sunt reduse în zonele de rezemare).
Recomandare de alegere seriei de dimensiuni a rulmenţilor (B, lăţimea şi D, diametrul exterior): din considerente de optimizare a proiectării se vor alege rulmenţi din seria mijlocie de dimensiuni.
|
|
|
|
|
|
a |
b |
c |
d |
|
Fig. TRD-P.1.2.6.2.2 Tipurile rulmenţilor folosiţi frecvent pentru lagărele reductoarelor conico-cilindrice: a – radial-axial cu bile; b – radial-axial cu role conice; c – radial cu bile; c – radial cu role cilindrice |
|||
TRD-P.1.2.6.3 ÎNTOCMIREA DESENULUI DE ANSAMBLU
În fig. TRD-P.1.2.6.3.1 se prezintă trei variante constructive ale reductoarelor conico-cilindrice (secţiunea principală) în care se evidenţiază componentele principale: arborele de intrare (A1) solidar cu pinionul conic (1I), arborele de intermediar (A2) solidar cu pinionul cilindric (1II), arborele de ieşire (A3), roata conică (2I), roata cilindrică (2II), rulmenţii lagărelor arborelui de intrare (R1), rulmenţii lagărelor arborelui intermediar (R2), rulmenţii lagărelor arborelui de ieşire (R3). Valorile cotelor marcate cu roşu se pot adopta conform recomandărilor din tab. TRD-P.1.2.6.3.1. Alte soluţii constructive cu poziţii ale axelor arborilor în plane diferite sunt prezentate în TRD-S.2.2 (reductoare conico-cilindrice orizontale), TRD-S.2.3 (reductoare conico-cilindrice orizontal-verticale), TRD-S.2.4 (reductoare conico-cilindrice vertical-orizontale), TRD-S.2.5 (reductoare conico-cilindrice verticale).
|
|
|
a |
|
|
|
b |
|
|
|
c |
|
Fig. TRD-P.1.2.6.3.1 Desen de ansamblu – secţunea principală: a varianta cu montaje cu rulmenţi radial-axiali cu bile şi cu rulmenţi radiali cu bile; b – varianta cu montaje cu rulmenţi radial-axiali cu role conice; c – varianta cu montaje cu rulmenţi radial-axiali cu role conice şi radial cu role role cilindrice |
Tab. TRD-P.1.2.6.3.1 Recomandări privind valorile parametrilor constructivi din desenul de ansamblu - secţiunea principală
|
Parametrul |
Denumire |
Valoarea recomandată |
Observaţii |
|
g1, g3 |
Grosimea peretelui flanşei paharului/capacului |
5…8 mm |
Se adoptă din considerente tehnologice; valori mici pentru forţe axiale reduse; valori mari pentru forţe axiale mărite |
|
g2 |
Lăţimea flanşei capacului |
12…17 mm |
Se adoptă în funcţie de dimensiunea filetului şurubului de fixare; pentru şuruburi de M6 se adoptă valori inferioare; pentru şuruburi de M8 se adoptă valori superioare |
|
g4 |
Grosimea peretelui carcasei |
6…9 mm |
Se determină în funcţie de procedeul tehnologic de obţinere a carcasei; valoarea recomandată este pentru carcasele din oţel turnate |
|
g5 |
Grosimea ramelor de rigidizare din zona lagărelor |
20…30 mm |
Se determină din considerente al gabaritului impus de dimensiunile piuliţei sau capului şurubului precum şi de acces a cheii de strângere a acestora |
|
g6 |
Înălţimea proeminenţei de aşezare a capacului |
2…4 mm |
Se adoptă din considerente tehnologice privind prelucararea prin aşchiere a suprafeţelor de aşezare a flanşelor capacelor |
|
x1, y1 |
Distanţa umărului arborelui de intrare faţă de capac |
6…10 mm |
Se adoptă din considerente de asigurare a montajului elementelor (roţi de curea, semicuplaje) pe arbore fără ca acestea să intre în coliziune cu capetele şuruburilor de fixare a capacelor |
|
x2 |
Distanţa dintre rulmenţii lagărelor arborelui de intrare |
(2…2,5)dR1 |
Se adoptă din considerente de optimizare constructivă şi de solicitare; distanţe reduse conduc la încărcări radiale mărite; la distanţe mărite forţele radiale sunt reduse dar creşte gabaritul |
|
x3 |
Distanţa de poziţionare a paharului |
0…4 mm |
Se adoptă din considerente împiedicare a uleiului de pătrundere la rulmentul lagărului adiacent |
|
x4 |
Distanţa pinionulu conic faţă de lagăr |
3…5 mm |
Se adoptă din considerente de ungere corespunzătoare a angrenajului conic |
|
x5 |
Distanţa de la roata cilindică carcasă |
8…12 mm |
Se adoptă din considerente gabaritului redus dar şi de ungere corespunzătoare a angrenajului cilindric |
|
y2, y4 |
Distanţa de la roţi la carcasă |
8…12 mm |
Se adoptă din considerente gabaritului redus dar şi de ungere corespunzătoare a angrenajelor |
|
y3 |
Distanţa dintre roţi |
8…12 mm |
|
|
y5 |
Distanţa de aliniere a rulmenţilor faţă de interiorul carcasei |
2…5 mm |
Se adoptă din considerente de ungere corespunzătoare a rumenţilor |
TRD-P.1.2.7 CALCULUL ARBORILOR
TRD-P.1.2.7.1 SCHEMELE DE CALCUL ALE ARBORILOR
Schemele de calcul ale aborilor reductorului conico-cilindric sunt prezentate în tab. TRD-P.1.2.7.1.1, TRD-P.1.2.7.1.2 şi TRD-P.1.2.7.1.3.
Tab. TRD-P.1.2.7.1.1 Schema de calcul a arborelui de intrare
|
Fig. TRD-P.1.2.7.1.1 Schema de încărcare a arborelui de intrare |
Formele şi dimensiunile tronsoanelor |
|
Tronsoanele cilindrice cu secţiune plină: 1 (cap de arbore STAS), 2 (suprafaţa de etanşare, fer. ETN-P.1, 3 (suprafaţă filetată pentru piuliţa canelată pentru rulmenţi fer. AFS-P.7, cu şaibă de siguranţă fer. AFS-P.8, 4 (tronson montare rulment adoptat), 5 (tronson cu diametrul mai mic decât al rulmentului), 6 (tronson montare rulment adoptat), 7 (tronson cu umăr de fixare axială), 8 (se consideră ca cilindriu cu diametrul egal cu diametrul mediu al pinionului conic); dimensiunile tronsoanelor (diametrul şi lungimea) se vor prelua din desenul de ansamblu |
|
|
Formele şi dimensiunile concentratorilor de racordare |
|
|
Racordare simplă (fer. ARD-P.7.1): 1-2, 2-3, 4-5, 5-6, 7-8; |
|
|
Racordare de rectificare (fer. ARD-P.7.3 şi fer. ARD-P.7.2): 6-7 |
|
|
Racordare pentru prelucrare filet şi canal pentru şaiba de siguranţă (fer. ARD-P.7.5): 3-4 |
|
|
Formele şi dimensiunile concentratorilor de suprafaţă |
|
|
Canal de pană (fer. APP-P.1.1) pe tronsonul 1 |
|
|
Filet metric (fer. AFS-P.1) pe tronsonul 3 |
|
|
Tipurile şi poziţiile reazemelor |
|
|
Reazemul A: articulaţie spaţială (deplasările radiale în direcţiile Y, Z şi axială X, nule); poziţionare în punctul determinat de intersecţia normalelor la căile de rulare cu axa arborelui (fer. ARD-P.3), cota a corespunde rulmentului ales (fig. TRD-P.1.2.6.2.2) |
|
|
Reazemul B: reazem simplu (deplasările radiale în direcţiile Y şi Z nule); poziţionare în punctul determinat de intersecţia normalelor la căile de rulare cu axa arborelui (fer. ARD-P.3), cota a corespunde rulmentului ales (fig. TRD-P.1.2.6.2.2) |
|
|
Valorile şi poziţiile forţelor şi momentelor la nivelul axei arborelui |
|
|
Forţe
transversale în direcţiile Z şi Y:
|
|
|
Forţa
axială în direcţia X:
|
|
|
Momentul de torsiune, |
|
|
Momentul de încovoiere, |
 şi, respectiv,
şi, respectiv,
 (fig.
TRD-P.1.2.5.1.2); se poziţionează axial la mijlocul danturii (
(fig.
TRD-P.1.2.5.1.2); se poziţionează axial la mijlocul danturii (


Tab. TRD-P.1.2.7.1.2 Schema de calcul a arborelui de intermediar
|
Fig. TRD-P.1.2.7.2 Schema de încărcare a arborelui de intermediar |
Formele şi dimensiunile tronsoanelor |
|
Tronsoanele cilindrice cu secţiune plină: 1 (tronson de montare a rulmentului adoptat); 2 (tronson cu umăr de fixare axială); 3 (se consideră cilindric cu diametrul egal cu diametrul de picior al pinionului cilindric), 4 (tronson cu umăr de fixare axială); 5 (tronson de montare roată conică), 6 (tronson de montare a rulmentului adoptat); dimensiunile tronsoanelor (diametrul şi lungimea) se vor prelua din desenul de ansamblu |
|
|
Formele şi dimensiunile concentratorilor de racordare |
|
|
Racordare simplă (fer. ARD-P.7.1): 2-3, 3-4, 5-6 |
|
|
Racordare de rectificare (fer. ARD-P.7.3 şi fer. ARD-P.7.2): 1-2, 4-5 |
|
|
Formele şi dimensiunile concentratorilor de suprafaţă |
|
|
Canal de pană (fer. APP-P.1.1) pe tronsonul 5 |
|
|
|
|
Reazemul A: articulaţie spaţială (deplasările radiale în direcţiile Y şi Z şi axială X nule); poziţionare în punctul determinat de intersecţia normalelor la căile de rulare cu axa arborelui (fer. ARD-P.3), cota a corespunde rulmentului ales (fig. TRD-P.1.2.6.2.2) |
|
|
Reazemul B: articulaţie spaţială (deplasările radiale în direcţiile Y şi Z şi axială X nule); poziţionare în punctul determinat de intersecţia normalelor pe căile de rulare cu axa arborelui (fer. ARD-P.3), cota a corespunde rulmentului ales (fig. TRD-P.1.2.6.2.2) |
|
|
Valorile şi poziţiile forţelor şi momentelor la nivelul axei arborelui |
|
|
Forţele
transversale în direcţia Z: |
|
|
Forţele
transversale în direcţia Y: |
|
|
Forţele
axiale:
|
|
|
Momentul de torsiune,
|
|
|
Momentele de încovoiere,
|




Obs. În fer. TRD-P.1 se prezintă schemele de încărcare a arborelui intermediar al reductoarelor conico-cilindrice HH, HV, VH şi VV.
Tab. TRD-P.1.2.7.1.3 Schema de calcul a arborelui de ieşire
|
Fig. TRD-P.1.2.7.3 Schema de încărcare a arborelui de ieşire |
Formele şi dimensiunile tronsoanelor |
|
Tronsoanele cilindrice cu secţiune plină: 1 (cap de arbore STAS), 2 (suprafaţa de etanşare, fer. ETN-P.2, 3 (tronson montare rulment adoptat), 4 (tronson de trecere), 5 (tronson montare roată dinţată cilindrică), 6 (tronson cu umăr de fixare axială a roţii), 7 (tronson cu umăr de fixare axială a rulmentului) , 8 (tronson montare rulment adoptat); dimensiunile tronsoanelor (diametrul şi lungimea) se vor prelua din desenul de ansamblu |
|
|
Formele şi dimensiunile concentratorilor de racordare |
|
|
Racordare simplă (fer. ARD-P.7.1): 1-2, 2-3, 3-4, 4-5, 6-7 |
|
|
Racordare de rectificare (fer. ARD-P.7.3 şi fer. ARD-P.7.2): 5-6; 7-8 |
|
|
Formele şi dimensiunile concentratorilor de suprafaţă |
|
|
Canal de pană (fer. APP-P.1.1), pe tronsoanele 1 şi 5 |
|
|
Tipurile şi poziţiile reazemelor |
|
|
Reazemul A: reazem simplu (deplasările radiale în direcţiile Y şi Z nule); poziţionare în punctul determinat de intersecţia normalelor la căile de rulare cu axa arborelui (fer. ARD-P.3), cota B corespunde rulmentului ales (fig. TRD-P.1.2.6.2.2) |
|
|
Reazemul B: articulaţie spaţială (deplasările radiale în direcţiile Y, Z şi axială X, nule); poziţionare în punctul determinat de intersecţia normalelor la căile de rulare cu axa arborelui (fer. ARD-P.3), cota B corespunde rulmentului ales (fig. TRD-P.1.2.6.2.2) |
|
|
Valorile şi poziţiile forţelor şi momentelor la nivelul axei arborelui |
|
|
Forţa
transversală în direcţie Z,
|
|
|
Forţa
transversală în direcţie Y,
|
|
|
Forţa
axială în direcţia X:
|
|
|
Momentul de torsiune,
|
|
|
Momentul de încovoiere, |


 ;
;
TRD-P.1.2.7.2 VERIFICAREA (DIMENSIONAREA) ARBORILOR
Verificarea modelelor de mai sus se va face cu pachetul MDESIGN conform exemplelor: subcap.
ARD-A.1.6, pentru arborele de intrare al unui reductor
cilindric într-o treaptă; subcap.
ARD-A.2.6, pentru arborele
intermediar al unui reductor cilindric în două trepte.
Pentru evidenţierea forţelor şi planelor în care acţionează forţele şi momentele pecum şi a unor parametri geometrici, în fer. TRD-P.1 se prezintă, ca exemple, schemele de încărcare a arborelui intermediar al reductoarelor conico-cilindrice HH, HV, VH şi VV.
TRD-P.1.2.8 CALCULUL RULMENŢILOR
Pornind de la faptul că la proiectarea arborilor s-au adoptat tipurile lagărelor şi rulmenţii acestora, în cadrul aceastei etape, se impune verificarea rulmenţilor adoptaţi prin parcurgerea algoritmului de proiectare din cap. RUL.P.1 şi/sau a aplicaţiei RUL.A.1. Pentru elaborarea schemei de încărcare a rulmenţilor se vor utiliza valorile forţelor din reazeme obţinute la calculul arborilor.
În cazul în care verificarea după capacitatea dinamică cu luarea în considerare a duratei de funcţionare şi turaţiei arborelui nu se îndeplineşte se impune readoptarea rulmentului in primă fază, considerând seria de dimeniuni imediat superioară, şi, dacă nici în acest caz nu verifică, se va adopta un rulment cu portanţă mărită (de ex. dacă, iniţial a fost adoptat rulment radial cu bile şi nu se îndeplineşte condiţia de verificare se va adopta un rulment radial-axial cu bile, cu aceaşi dimensiune a alezajului interior, care are capacitatea dinamică de catalog mai mare).
TRD-P.1.2.9 CALCULUL ASAMBLĂRILOR ARBORE-BUTUC
Asamblările arbore-butuc cu pene paralele adoptate în cadrul etapei de configurare a roţilor şi arborilor se vor verifica prin parcurgerea algoritmului de proiectare AAB-P.1.1 şi a aplicaţiei AAB-A.1.1.
TRD-P.1.2.10 PROIECTAREA CARCASELOR
Carcasele reductoarelor de turaţie au rolul, pe de-o parte, de a asigura poziţia relativă a lagărelor arborilor şi, deci, de a prelua forţele care apar în angrenajele din interior şi, pe de altă parte, de a asigura un mediu de ungere cu o baie de ulei în carcasa inferioară.
De obicei, reductoarele de turaţie din considerente privind posibilitatea de asamblare a elementelor din interior (roţi dinţate, rulmenţi, arbori etc.) au carcasa este un subansamblu (fig. TRD-P.1.2.11.1) compus din unul sau mai multe componente cu forme şi dimensiuni care asigură tehnologicitate şi productiviate mărite.
|
|
|
|
|
Fig. TRD-P.1.2.11.1 Structura constructivă a subansamblului carcasă al unui reductor cilindric cu o treaptă |
Recomandări pentru proiectarea caracselor reductoarelor:
a. Reductoarele orizontale (cu toate axele arborilor în plan orizontal), de obicei, au subansamblu carcasă format din carcasă inferioară şi carcasa superioară, planul de separaţie dintre acestea, fiind determinat de axele arborilor; baza de aşezare a carcasei inferioarela fundaţie este paralelă cu planul de separaţie, de asemenea, în plan orizontal.
b. Reductoarele verticale au subansamblul carcasă format din mai multe părţi, carcasă inferioară, carcasă superioară şi una sau mai multe carcase intermediare; planele de separaţie dintre acestea conţin o axă sau mai multe axe ale arborilor pe care se sprijină roţile angrenajelor sunt paralele cu planul bazei,orizontal.
c. Carcasele pentru asigurarea unei rigidităţi mărite în zona lagărelor dar şi pentru a permite asamblarea în subansamblu carcasă au rame îngroşate şi nervuri de rigidizare; în zonele paralele cu axele alezajelor pentru rulmenţi ramele caracselor sunt mult mai subţiri. Alezajele pentru rulmenţii fiecărui arbore sunt identice, şi din considerente de tehnologicitate mărită privind realizarea concentricităţii se prelucrează din aceaşi trecere a sculelor de prelucrare.
d. Carcasele inferioare sunt prevăzute cu tălpi de fixare la fundaţie cu bosaje şi alezaje pentru sistemul de urmărire a nivelului uleiului şi pentru buşonul de golire; suprafaţă inferioară se execută cu o înclinare (2o …3o) spre gaura buşonului de golire.
e. Carcasele superioare sunt prevăzute cu un locaş de vizitare, de obicei, pătrat sau dreptunghiular, cu urechi de ridicare sau găuri în care se montează inele de ridicare pentru a transporta reductorul cu utilaje specifice; în plus, unele variante constructive sunt prevăzute, la partea superioară, cu găuri filetate în care se montează buşoane de aerisire.
f. Asamblarea carcaselor reductoarelor se realizeză prin intermediul unor şuruburi sau prezoane montate cu joc care pentru rigidizare şi asigurarea etanşeităţii în zona planului de separaţie sunt asamblate cu prestrângere; pentru menţinerea aceleeaşi poziţii relative a perechilor de carcase asamblate se utilizeză câte două ştifturi de centrare, care în vederea asigurării unei precizii mărite de poziţionare sunt montate la distanţa maxim posibilă. Fluxul tehnologic de obţinere a subansamblului carcasă are următoarele etape: prelucrarea (frezare şi, eventual, rectificare) suprafeţei de aşezare pe fundaţie a carcasei inferioare şi a suprafeţelor de separţie cu respectarea condiţiilor de planeitate şi calitatea suprafeţei; prelucrarea găurilor de trecere şi filetate pentru şuruburile de fixare şi ştifturile de centare; asamblarea celor două carcase prin montarea ştifturilor de poziţionare şi strângerea şuruburilor de fixare; prelucrarea în stare asamblată a alezajelor pentru rulmenţi şi a suprafeţelor de aşezare a capacelor.
g. Pentru evitarea solicitărilor suplimentare de încovoiere care ar putea să apară în tija şurubului (prezonului) este necesar asigurarea perpendicularităţii dintre suprafaţa de aşezare a capului şurubului sau piuliţei şi axa şurubului (prezonului) şi deci în acest scop aceste suprafeţe se vor prlucra prin aşchiere sub formă de lamaje sau bosaje.
TRD-P.1.2.11 PROIECTAREA SUBSISTEMELOR DE UNGERE ŞI ETANŞARE
TRD-P.1.2.11.1 Proiectarea subsistemului de ungere (subcap. ETB-4.3)
Tab. TRD-P.1.2.11.1 Model simplificat pentru calculul termic
|
Fig. TRD-P.1.2.11.1 Schema de calcul termic |
Din ecuaţia de echilibru termic,
rezultă relaţia de calcul a temperatura uleiului,
în care, t0 este temperatura maximă a mediului ambiant în care funcţionează reductorul (uzual, t0 = (18 … 25) oC); Pi [kW] – puterea la arborele de intrare al reductorului; ηR – randamerntul reductorului (subcap. TRD-P.1.2.3); λ – factorul transmiterii căldurii de la carcasă la aer (λ = (8…12) W/m2 oC, pentru o circulaţie slabă a aerului în zona reductorului); Se = 1,2…1,3 S [m2] – suprafaţa exterioară a reductorului cu S suprafaţa teoretică (factorul 1,2 ia în considerare nervurile de rigidizare şi ramele de asamblare; ta – temperatura de lucru admisibilă a uleiului (ta = (60…70) oC); Pe - puterea la arborele de ieşire al reductorului; Q – căldura generată de frecările din interior şi evacuată spre exterior. |
|
Obs. Situaţii practce posibile: a. Respectarea inegalităţii (TRD-P.1.2.11.2) conduce la un sistem de ungere prin barbotare. b. Nerespectarea inegalităţii (TRD-P.1.2.11.2) implică următoarele variante: mărirea suprefeţei exterioare a reductorului prin nervurare; adoptarea unui sistem de ventilare exterior; adoptarea unui sistem de răcire a uleiului. |
|

Tab. TRD-P.1.2.11.2 Ungerea prin barbotare (imersare)
|
Fig. TRD-P.1.2.11.2 Schema de ungere prin imersare (barbotare) |
Recomandări practice: a. Pentru v ≤ 15 m/s se utilizează ungerea prin imersare (barbotare); adâncimea de imersare a unei unei roţi în ulei (1..2)m < h < (6…8)m (m este modulul danturii) sau, uzual, 10 mm ≤ h < 1/3 din raza roţii (fig. TRD-P.1.2.11.2). Distanţa de la roată la fundul băii de ulei (3…4)δ ≤ H < (5…7)δ cu δ grosimea peretelui carcasei (uzual, δ = 7…8 mm). Roata conică trebuie să se afle în ulei pe toată înăţimea din secţiunea exterioară a dintelui. b. Pentru 15 < v ≤ 20 m/s se utilizează ungerea cu circulaţie forţată a uleiului, prin pulverizarea uleiului direct pe dinţii roţilor în zona de angrenare. c. Pentru v > 20 m/s se utilizează ungerea prin pulverizare în zona plasată înainte de angrenare.
|
TRD-P.1.2.11.2 Proiectarea subsistemului de etanşare (subcap. ETB-4.4)
Etanşările fixe ale carcaselelor se asigură prin strângerea acestora fără ca între suprafeţele plane de separaţie (prelucrate cu mare precizie privind planeitatea şi rugozitatea) să se monteze garnituri de etanşare care ar modifica alezajele rulmenţilor prelucrate în subansamblul carcasă; uneori, în cazul dimensiunilor mari, se pot folosi paste de etanşare.
Etanşările fixe între capac şi carcasă se fac cu garnituri inelare din carton presat sau din material moale (Al sau Cu); în cazul lagărelor cu rulmenţi radial-axiali garnitura metalică are şi rolul de reglare a jocului din rulmenţi.
Etanşările mobile la nivelul arborilor de intrare se asigură prin intermediul garniturilor din pâslă, la viteze reduse, sau garnituri manşetă de rotaţie (fer. RUL-S.2)
TRD-P.1.2.12 DESEN DE ANSAMBLU FINAL. ELABORARE DOCUMENTAŢIE TEHNICĂ
Pentru definitivarea desenului de ansamblu şi elaborarea documentaţiei tehnice se va urmări: cap PRC-P.2.1.1 şi exemplul din fer. PRC-G.4 (reductor conico-cilindric orizontal), TRD-S.2.2 (reductoare conico-cilindrice orizontale), TRD-S.2.3 (reductoare conico-cilindrice orizontal-verticale), TRD-S.2.4 (reductoare conico-cilindrice vertical-orizontale), TRD-S.2.5 (reductoare conico-cilindrice verticale).
TRD-P.1.2.13 PROIECTAREA CONSTRUCTIVĂ DE DETALIU. DESENE DE EXECUŢIE
Pentru elaborarea desenelor de execuţie se va urmări: cap PRC-P.2.1.2 şi exemplele din fer. PRC-G.5 (arbore de intrare cu pinion conic cu dantură dreaptă), PRC-G.6 (arbore de intrare cu pinion conic cu dantură Gleason), PRC-G.7 (arbore de intrare cu pinion conic cu dantură eloidă), PRC-G.8 (arbore intermediar cu pinion cu dantură cilindrică), PRC-G9 (arbore de intrare cu pinion cilindric) şi PRC-G10 (roată dinţată cilindrică).