AEV.
ANGRENAJE EVOLVENTICE
AEV-A. ANGRENAJE EVOLVENTICE - APLICAŢII
AEV-A.2 ANGRENAJE CONICE – APLICAŢII
AEV-A.2.2 ANGRENAJE CONICE CU DANTURĂ CURBĂ - APLICAŢIE
|
CUPRINS |
|
AEV-A.2.2.1 DATE DE PROIECTARE AEV-A.2.2.2 ALEGEREA MATERIALELOR, TRATAMENTELOR
TERMICE ŞI TEHNOLOGIEI AEV-A.2.3.3 PREDIMENSIONARE ŞI PROIECTAREA
FORMEI CONSTRUCTIVE AEV-P.2.2.3.1 Predimensionare AEV-P.2.2.3.2 Proiectarea formei
constructive AEV-A.2.2.4 DIMENSIONARE ŞI VERIFICARE AEV-A.2.2.5 PROIECTAREA FORMEI TEHNOLOGICE. DESENE
DE EXECUŢIE AEV-A.2.2.6 VERIFICAREA MODELULUI CU MDESIGN |
AEV-A.2.2.1
DATE DE PROIECTARE
Să se
proiecteze angrenajul conic al unui reductor conico-cilindric (v.
cap. TRD-P.1.1.2; TRD-A.1.1.2), cunoscând schema din fig.
AEV-A.2.2.1.1 şi datele din tab. AEV-A.2.2.1.1. Rezolvarea
se face parcurgând metodologia din cap. AEV.P.2 cu centralizarea rezultatelor
parţiale şi finale în lista AEV-L.2.
Tab.
AEV.A.2.2.1.1 Definirea problemei de proiectare a unui
angrenaj conic ortogonal cu
dantură curbă
|
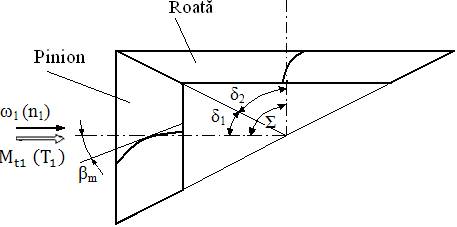
Fig.
AEV-A.2.2.1.1 Schema
structurală a angrenajului conic ortogonal cu dantură
dreaptă |
Date iniţiale |
|
a.
Turaţia la intrare (pinion), n1
= 1200 rot/min b.
Momentul
de torsiune la intrare (pinion), Mt
(T1) = 95493 Nmm şi din fer.
AEV-C.2 rezultă puterea la intrare,
c. d.
Raportul de angrenare, u = 4,5. e.
Unghiul
dintre axele roţilor, Σ =
90o şi din fer. AEV-C.2.1 se determină semiunghiurile,
f.
Numărul
de angrenaje identice în paralel,
χ =1. g.
Durata de funcţionare, Lh = 9000 ore. h.
Tipul danturii, curbă. i.
Condiţii
de funcţionare:
tipul
maşinii (utilajului) în care se integrează: transportor industrial;
tipul încărcării exterioare (constantă, alternativă, cu şocuri etc.):
alternativă; tipul motorului de acţionare: motor electric asincron;
caracteristicile mediului în care funcţioneză: domeniul temperturilor de
lucru, - 20… + 50 oC; mediul de lucru cu praf şi umezeală
ridicată. j.
Condiţii
ecologice: utilizarea de materiale
şi tehnologii eco, reciclarea materialelor, protecţia vieţii |
AEV-A.2.2.2 ALEGEREA MATERIALULUI, TRATAMENTELOR
TERMICE ŞI TEHNOLOGIEI
|
Tab. AEV-A.2.2.2.1 Materialul, tratamentul termic şi
caracteristicile de rezistenţă specifice solicitărilor
angrenajului şi roţiilor (v. subcap.
AEV-P.2.2;
fer.
AEV-M.1) |
||||||
|
Materialul |
Tratamentul
termic |
Fluxul
tehnologic |
Durităţile
flancurilor |
Duritatea
miezului |
Tensiunea
limită la contact, σHlim
[MPa] |
Tensiunea
limită la încovoiere, σFlim
[MPa] |
|
18CrNi20 |
Cementare (carburare +călire+revenire
joasă) |
Prelucrare dantură prin aşchiere: strunjire,
frezare dantură + cementare + călire |
HRC1= HRC2= 58 |
HB1= HB2 = 350 |
1500 |
400 |
|
Alte caracteristici: σr
= 1175…1420 MPa,
σ02 = 1780
MPa, E = 206000 MPa, ν = 0,3 |
||||||
AEV-A.2.2.3
PREDIMENSIONARE ŞI PROIECTAREA FORMEI CONSTRUCTIVE
AEV-A.2.2.3.1 Predimensionare (v. subcap. AEV-P.2.3)
Scop: determinarea preliminară a
modulului exterior, me, necesar pentru proiectarea formei şi
întocmirea schemei de calcul de verificare/dimensionare (etape care nu se pot
derula deoarece unii parametri nu sunt evaluabili la început).
Tab. AEV-A.2.2.3.1 Parametri şi relaţii de predimensionare
|
Condiţia
impusă |
Parametrii
din relaţiile de calcul |
Relaţiile
de calcul |
||
|
Rezistenţă la
solicitarea de contact |
βm = 350 (fer. AEV-A.2.1); z1 = 14 (fer.
AEV-A.2.1); z2 = u z1
= 63; KA=1,25 (fer. AEV-F.2); Kv = 1,1 (fer. AEV-F.3); ψd = 0,6 (fer.
AEV-P.2.1); NL1=60 n1 Lh χ = 7,2.108 cicluri (fer. AEV-C.1.5); NL2=60n1 Lh χ /ur = 1,6.108 cicluri (fer. AEV-C.1.5);
|
KHβ =1,875 (fer. AEV-F.4); KHα = 1,3 (fer. AEV-F.5); Zε = 0,93 (fer. AEV-F.6); ZH = 3.1 (fer. AEV-F.7); ZE = 190 MPa1/2
(fer. AEV-F.14); SHmin= 1,0 (fer. AEV-F.1); ZN = max(ZN1,
ZN2) =1, ZN1,2 din fer. AEV-F.13; σHP =
σHlim ZN /SHmin |
|
(fer. AEV-C.2.2) |
|
Rezistenţă la
solicitarea de încovoiere |
KFβ =
1,875 (fer.
AEV-F.4); KFα = 1,3
(fer.
AEV-F.5); Yε = 0,78 (fer.
AEV-F.6); Yβ = 0,95
(fer.
AEV-F.9); YSa1=1,6 (fer. AEV-F.15); YSa2=1,85 (fer. AEV-F.15) YFa1 = 3,6 (fer.
AEV-F.7); YFa2 = 2,5 (fer.
AEV-F.7); SFmin = 1,4 (fer.
AEV-F.1); YN1,2 = 1 (fer. AEV-F.13); YST = 2; σFP1,2 =
σFlimYN1,2YST/ SFmin |
|
(fer. AEV-C.2.3) |
|
|
Obs. Deoarece valorile modulului obţinute sunt cvasiaceleaşi angrenajul este egală rezistenţă la contact şi respectiv la încovoiere |
||||


AEV-A.2.2.3.2 Proiectarea formei constructive
Scop: Conceperea din
considerente funcţionale,
constructive şi/sau tehnologice a configuraţiilor roţilor
dinţate.
Tab. AEV-P.2.3.2. Parametrii şi relaţii de calcul a
parametrilor principali ai angrenajului
|
Parametrul din predi- mensionare |
Calculul modulilor |
Stabilirea modulului standard sau asociat sculei |
Adoptarea factorilor deplasării
danturii |
Calculul parametrilor geometrici principali
ai angrenajului |
||
|
me |
|
(fer. AEV-C.2.4)
|
Pentru dantură curbă în arc de cerc (Gleason), se adoptă modulul exterior frontal (fer. AEV-P.2.3) me |
Pentru dantură curbă în arc de cerc se adoptă din fer. AEV-P.2.2 factorii deplasărilor tangenţiale, xsm1 = - xsm2 = 0,182, şi radiale xhm1 = - xhm2 = 0,38
|
Diametrele de divizare exteriore,
Lungimea generatoarei conului exterior,
Lăţimea danturii,
|
(fer. AEV-C.2.6) |
Tab. AEV-A.2.2.3.3 Schema
cinematică. Formele pinionului şi roţii
|
|
a |
b |
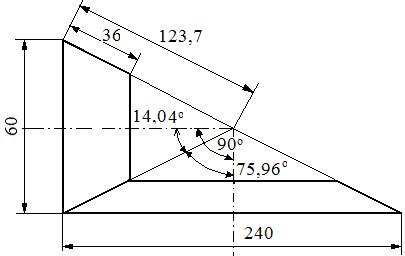
Schema cinematică din fig. AEC-A.3.3.1, reprezentată la
scara 1:1, evidenţiază grafic structura raţională din
punct de vedere al proporţiilor a angrenajului. Calculul aproximativ al diametrelor
arborilor care susţin roţile:
(fer. AEV-CX.1) Se adoptă dA1= 27 mm; dA2
= 45 mm (tronsonul arborelui pe care se montează roata este mai mare decât
cel al capului arborelui). Calculul aproximativ al lungimilor
butucilor roţilor:
(fer. AEV-CX.2)
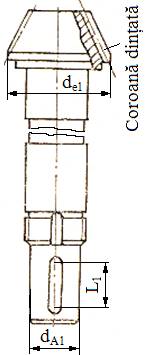
Configurarea formelor roţilor dinţate conice: Pinionul este o roată dinţată cu dimensiune
radială mică are numai partea de coroană (discul şi
butucul sunt inexistente, fig. AEV-A.3.3.2,a) puţin mai mare decât dimensiunile
arborelui (dA1 = 30 mm < de1 = 63) şi se
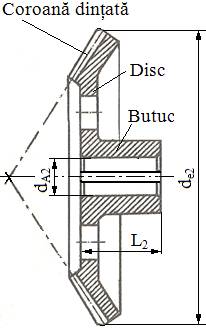
execută corp comun cu arborele. Roata
(AEV-A.3.3.2,b) are dimensiune radială mare şi se poate configura cu trei
părţi: coroană dinţată, disc (cu găuri de
uşurare) şi butuc. |
|
Fig. AEV-A.3.3.1
Schema cinematică a
angrenajului conic |
Fig. AEV-A.3.3.2 Formele
roţilor dinţate conice: a
– arbore cu pinion; b – roată |
||
AEV-A.2.2.4
DIMENSIONARE ŞI VERIFICARE
Tab.
AEV-A.2.2.4.1 Calculul
parametrilor geometrici şi a factorilor de corecţie
|
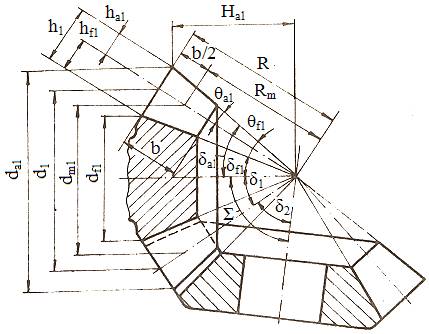
Fig. AEV-A.2.4.1 Parametrii geometrici principali ai angrenajului conic ortogonal şi ai roţilor |
Determinarea parametrilor de calcul: a. Stabilirea şi calculul principalelor elemente geometrice conform
relaţiilor din fer.
fer.
AEV-C.2.7
(v. fer.
AEV-T.2.1); calculul geometric se poate face şi cu
pachetul performant MDESIGN. b. Determinarea vitezei periferice a angrenajului (în polul angrenării exterior), c.
Adoptarea treptei de precizie, procedeului de
prelucrare şi rugozităţilor: treapta de precizie 8, frezare de finisare, rugozitate flancuri active Ra =
1,6 μm, rugozitate zone de racordare Ra = 3,2 μm (fer.
AEV-P.1.6; fer. AEV-F.11). d. Adoptarea vâscozităţii şi tipului
lubrifiantului TIN 300 EP (fer. AEV-F.12). e.
Readoptarea factorului de lăţime Ψd = 0,6 (fer.
AEV-P.1.3). f.
Stabilirea lăţimilor roţilor: b=Ψd
de1 = 36 mm, b < 0,35Rm (fer.
CEL-C.) Determinarea factorilor de corecţie dependenţi de dimensiunile angrenajelor real şi virtual: |
|||||||
|
Kv =1,1 |
(fer. AEV-F.3) |
KHβ=1,42 |
(fer. AEV-F.4) |
KFβ =1,25 |
(fer. AEV-F.4) |
KHα = 1,3 |
(fer. AEV-F.5) |
|
|
KFα = 1,2 |
(fer. AEV-F.5) |
Zε =0,95 |
(fer. AEV-F.6) |
Yε = 0,85 |
(fer. AEV-F.6) |
Yβ = 1 |
(fer. AEV-F.9) |
|
|
ZL = 1,1 |
(fer. AEV-F.12) |
ZR = 1 |
(fer. AEV-F.11) |
Zv = 0,97 |
(fer. AEV-F.10) |
Zw = 1 |
(fer. AEV-F.9) |
|
|
Zx = 1 |
(fer. AEV-F.8) |
ZH
= 2,5 |
(fer. AEV-F.7) |
YFa1 = 2,75 |
(fer. AEV-F.7) |
YFa2 = 2,15 |
(fer. AEV-F.7) |
|
|
YR1 = 1 |
(fer. AEV-F.11) |
YR2 = 1 |
(fer. AEV-F.11) |
YSa1 = 1,55 |
(fer. AEV-F.15) |
YSa2 = 1,9 |
(fer.AEV-F.15) |
|
|
Yδ1 =1 |
(fer. AEV-F.15) |
Yδ2 = 1 |
(fer. AEV-F.15) |
Yx1 = 1 |
(fer. AEV-F.8) |
|
|
|
Tab.
AEV-A.3.4.2 Calcule de verificare şi/sau dimensionare (v.
subcap. AEV-P.2.4)
|
Calculul
parametrilor de verificare/redimensionare |
|
|
Tensiunea efectivă maximă de contact |
Tensiunile efective maxime de încovoiere |
|
|
|
|
Factorul de siguranţă la solicitarea de contact |
Factorii de siguranţă la solicitarea de încovoiere |
|
|
|
|
Verificare |
|
|
SH
≥ SHmin (1,74
>1,15); SF
= min(SF1, SF2)
≥ SFmin (8,78 >
1,5); pentru SHmin şi SFmin
(fer.
AEV-F.1) |
Obs. Cele
două inegalităţi sunt respectate cu abateri reduse
solicitările sunt verificate apropiat, angrenajul nu este
supradimensionat major şi nu se impune dimensionare. |
Tab.
AEV-A.3.4.3 Calculul forţelor din angrenajul conic
|
Relaţiile
de calcul a forţelor (fer. AEV-C.2.9; v. tab.
AEV.P.2.4.3) |
|||
|
Ft
[N] |
Fr1,2
[N] |
Fa1,2
[N] |
Fn
[N] |
|
|
|
|
|
AEV-A.2.2.5
PROIECTAREA FORMEI TEHNOLOGICE. DESENE DE EXECUŢIE
|
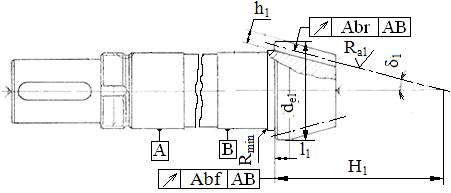
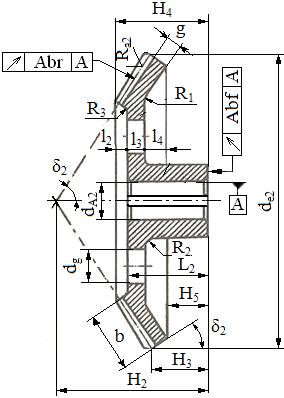
Configurarea formelor tehnologice ale roţilor |
||
|
Pinionul, se
execută din semifabricat laminat prin strunjirea corpului urmată de
frezarea danturii. În acest caz se adoptă raza de racordare, Rmin
= 1,5 mm, la saltul dintre arbore şi coroana dinţată (fig
AEC-P.2.5.1,a). Roata conică se execută din semifabricat forjat (fig.
AEV-A.2.5.1,b), prelucrat prin strunjire, urmată de frezarea danturii.
Lungimea butucului se determină în funcţie de lungimea
asamblării arbore-butuc
(pentru asamblarea cu pane paralele, v. fer. AEV-CX.2). |
||
|
|
|
Specificaţii pentru execuţie înscrise pe desen: a. Cote dimensionale: diametrul exterior al cercului de cap, da2; cotele H2,3,4,5,
l2; lăţimea danturii, b. b.
Simboluri de
evidenţiere a abaterilor de poziţie: bătaie
radială (concentricitate) a danturii (suprafaţa conului de
divizare) în raport cu suprafaţa (suprafeţele) de rezemare de
rotaţie simbolizate şi marcate cu A sau cu A şi B; bătaie
frontală a suprafeţelor de rezemare în raport cu suprafaţa
(suprafeţele) de rezemare de rotaţie simbolizate şi
marcată cu A sau cu A şi B. c.
Simboluri de calitatea suprafeţei: danturii şi
suprafeţelor de rezemare cilindrice şi frontal. Specificaţii pentru
execuţie înscrise tabelar pe desen sau ataşat: modulul
exterior, me; numărul
de dinţi, z; unghiul de înclinare al danturii, β; direcţia
înclinării dinţilor (dreapta sau stânga); profilul de
referinţă; coeficientul deplasării radiale a danturii, xsm;
treapta de precizie şi jocul conform STAS 6273; grosimea dintelui la
exterior; înălţimea dintelui la exterior. |
|
a |
b |
|
|
AEV-A.2.5.1 Specificaţii înscrise pe desenele
de execuţie: a - pinion corp comun cu arborele; b roată conică |
||
AEV-A.2.2.6 VERIFICAREA MODELULUI CU PACHETUL PERFORMANT
MDESIGN