AEV.
ANGRENAJE EVOLVENTICE
AEV-P. PROIECTAREA ANGRENAJELOR EVOLVENTICE
AEV-P.1 PROIECTAREA ANGRENAJELOR CILINDRICE
|
CUPRINS |
|
AEV-P.1.1 DATE DE PROIECTARE AEV-P.1.2 ALEGEREA MATERIALELOR, TRATAMENTELOR
TERMICE ŞI TEHNOLOGIEI AEV-P.1.3 PREDIMENSIONARE ŞI PROIECTAREA FORMEI
CONSTRUCTIVE AEV-P.1.3.1 Predimensionare AEV-P.1.3.2 Proiectarea formei
constructive AEV-P.1.4 DIMENSIONARE ŞI VERIFICARE AEV-P.1.5 PROIECTAREA FORMEI TEHNOLOGICE. DESENE DE
EXECUŢIE AEV-P.1.6 VERIFICAREA
MODELULUI CU MDESIGN |
Parcurgerea
metodologiei de mai jos pentru cazuri concrete se va face
cu memorarea temporară a valorilor principalilor parametri de proiectare
în lista AEV-L.1
(se activeză cu tasta Ctrl apăsată)
AEV-P.1.1 DATE DE PROIECTRE
Tab. AEV-P.1.1 Definirea problemei de proiectare a unui
angrenaj cilindric
|
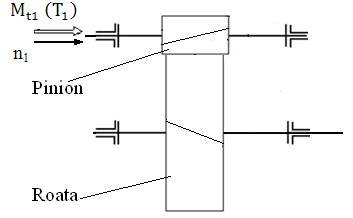
Fig. AEV-P.1.1.1 Schemă funcţională angrenaj cilindric |
Date iniţiale |
|
a.
Turaţia la intrare (pinion),
n1 [rot/min]. b.
Puterea la intrare,
P1 [kW], şi din fer.
AEV-C.1 rezultă valoarea
momentului de torsiune, c.
Raportul de angrenare,
u. d.
Durata de funcţionare, Lh [ore]. e.
Numărul de angrenaje identice în paralel, χ. f.
Tipul danturii danturii: dreaptă, înclinată sau în V. g.
Parametrii geometrici impuşi (opţional): distanţa dintre axe aw;
standardizarea distanţei dintre axe; unghiul de înclinare a danturii;
diametrul pinionului, sau
modulul danturii. h.
Condiţii de funcţionare: tipul transmisiei în care se integrează,
tipul maşinii motoare, tipul instalaţiei antrenate, temperatura de
lucru, caracteristicile mediului în care funcționează). i.
Condiţii ecologice (utilizarea de materiale şi tehnologii eco, reciclarea
materialelor, protecţia vieţii). |
AEV-P.1.2 ALEGEREA MATERIALELOR, TRATAMENTELOR
TERMICE ŞI TEHNOLOGIEI (subcap. AEV-T.1.5)
Tab. AEV-P.1.2.1 Recomandări generale de alegere a
materialului şi tratamentelor termic [Rădulescu, 1985]
|
Condiţiile
de funcţionare a angrenajului |
Tipul sarcinii externe |
Oţelurile
şi tratamentele termice/termochimice recomandate |
|
Grele: viteze periferice mari (v = 8… 12 m/s) şi
tensiuni de contact foarte mari |
Sarcini foarte mari
cu şocuri |
Oţeluri de
cementare aliate (13 CrNi30, 18 MoCrNi13, 20 MnNi35; 21MoMnCr12, 21 TiMnCr
12, 15 Cr. 08 etc.), cementate pe
adâncime mai mare de 1…1,5 mm sau carbonitrurate pe adâncime de
0,6…0,8 mm şi călite, stratul superficial cu duritatea 55…62 HRC,
iar miezul cu 250…400 HB |
|
Medii: viteze periferice medii (v = 4…10 m/s) şi
tensiuni de contact mari sau medii |
Sarcini mari cu
şocuri |
Oţeluri de
îmbunătăţire aliate (50VCr11, 41MoC11, 38MoCrAl09 etc. ),
îmbunătăţite la durităţi de 300…350 HB şi
nitrurate pe adâncime de 0,2…0,3 mm, la 50…60 HRC |
|
Sarcini mari cu
şocuri |
Oţeluri de
îmbunătăţire aliate (40Cr10, 41MoC11, 41CrNi12 etc.),
îmbunătăţite la durităţi de 30…35 HB şi
călite superficial la 45…55 HRC |
|
|
Sarcini medii cu
şocuri |
Oţeluri de cementare
(C10, C15) cementate pe adâncime mai
mare de 0,8…1,2 mm sau carbonitrurate pe adâncime de 0,6…0,8 mm şi
călite, stratul superficial cu duritatea 45…60 HRC |
|
|
Sarcini medii cu
sau fără şocuri reduse |
Oţeluri de
îmbunătăţire aliate (40Cr10, 41MoC11, 41CrNi12, etc.), îmbunătăţite la
durităţi de 300…350 HB Oţeluri de
îmbunătăţire aliate (30MoCrNi20, 34MoCrNi15, 33MoCr11, etc.), îmbunătăţite la
durităţi de 250…350 HB |
|
|
Uşoare: viteze periferice mici (v < 6 m/s) şi tensiuni
de contact medii sau mici |
Sarcini mici
fără şocuri |
Oţeluri carbon
de calitate (C45, C55, C60), îmbunătăţite la 200…250 HB |
|
Foarte uşoare: viteze periferice
mici şi tensiuni de contact mici |
Sarcini foarte mici
fără şocuri |
Oţeluri carbon obişnuite netratate
(S235, S275, S355), oţeluri turnate, fontă turnată (Fgn600;
Fgn700), textolit. |
Semifabricatele pentru roţi dinţate pot fi: bare laminate, pentru diametre sub 200 mm; forjate şi turnate pentru diametre 300…900 mm, sudate pentru diametre peste 1000mm. În cazul roţilor dinţate cu dimensiuni mari (diametre peste 400 mm), din materiale scumpe, se recomandă execuţia coroanei din materialul impus danturii şi partea de butuc şi disc din oţel de construcţie obişnuit sau fontă (fer. AEV-M.1).
Tehnologiile (procedeele) de fabricaţie a roţilor
dinţate constau în: prelucrarea prin aşchiere de degroşare
prin frezare sau mortezare, de finisare
prin şeveruire sau rectificare;
prelucrarea prin deformare plastică (subcap.
AEV-T.1.5).
|
Alegerea materialului,
tratamentelor termice, fluxul tehnologic principal şi caracteristicile
de rezistenţă specifice solicitărilor angrenajului şi
roţiilor (v. subcap.
AEV-T.1.5,
fer.
AEV-M.1) se sintetizează în următorul tabel Tab. AEV-P.1.2.2
Informaţii sintetice despre material |
||||||
|
Materialul |
Tratamentul
termic |
Fluxul
tehnologic global |
Durităţile
flancurilor |
Duritatea
miezului |
Tensiunea
limită la contact |
Tensiunea
limită la încovoiere |
|
Marca |
Denumire sau succesiune |
Succesiune |
HB1= HB2+30…50 (HB < 350);
HRC1=HRC2 |
HB1,2 |
σHlim [MPa] |
σFlim [MPa] |
AEV-P.1.3
PREDIMENSIONARE ŞI PROIECTAREA FORMEI CONSTRUCTIVE
AEV-P.1.3.1
Predimensionare (cap.
AEV-T.2.1 pentru angrenajele cilindrice cu dantură
dreaptă sau
AEV-T.2.2 pentru angrenajele cilindrice cu dantură
înclinată)
Scop: determinarea
preliminară a unei dimensiuni (distanţa dintre axe, modulul sau
diametrul pinionului), necesară pentru proiectarea formei şi
întocmirea schemei de calcul pentru dimensionare şi verificare (etape care
nu se pot derula deoarece unii parametrii nu sunt evaluabili la început fiind
dependenţi de parametri necunoscuţi).
Tab. AEV-P.1.3.1.1 Parametrii şi relaţii de predimensionare
|
Condiţia
impusă |
Relaţia
de calcul de predimensionare |
Parametrii
din relaţiile de calcul |
Cazuri
de utilizare |
|||
|
Rezistenţă la solicitarea de contact |
|
(fer. AEV-C.1.1)
|
β=6…200 sau 30…450 (fer. AEV-P.1.2); z1 =
17…24, (fer.
AEV-P.1.1); z2 = u z1
(se rotunjeşte z2; se recalculează u (ur); se
verifică, dacă este cazul, abaterea raportului de angrenare,
(fer. AEV-C.1.4); KA=1…2,5 (fer. AEV-F.2); Kv =
1…1,5 (fer. AEV-F.3); ψa=0,1…0,6, ψm=15…35, ψd=0,6…1,4 (fer. AEV-P.1.3); NL1=60n1Lh χ, NL2=60n1Lh
χ/ur (fer. AEV-C.1.5) |
KHβ
=1,1…1,5
(fer. AEV-F.4); KHα =
1,1…1,3 (fer. AEV-F.5); Zε
= 0,9…0,96 (v.
fer. AEV-F.6); ZH =
2,3…2,6 (pt. dantură nedeplasată, v.
fer. AEV-F.7); ZE = 190
MPa (pt. oţeluri laminate, fer. AEV-F.14);
SHmin=
1,2 (fer. AEV-F.1); ZN = min(ZN1, ZN2) cu ZN1,2 din fer. AEV-F.13 σHP =
σHlim ZN /SHmin; |
Cutii de viteze |
|
|
|
Cutii de viteze |
|||||
|
|
Reductoare de
turaţie |
|||||
|
Rezistenţă
la solicitarea de încovoiere
|
|
(fer. AEV-C.1.2) |
KFβ
=1,1…1,5 (fer. AEV-F.4); KFα
= 1,2…1,3 (fer. AEV-F.5); Yε
= 0,85…0,9 (fer. AEV-F.6); Yβ
= 0,9…0,95 (fer. AEV-F.9); Ysa1,2
= 1,5...1.97 (fer. AEV-F.15, dantură nedeplasată, în funcţie de z1,2); YFa1,2
= 2...3.5
(fer.
AEV-F.7, dantură nedeplasată în funcţie de z1,2); SFmin=
1,5 (fer. AEV-F.1); YN1,2 (fer. AEV-F.13) YST = 2; σFP1,2 =
σFlimYN1,2YST/ SFmin;
|
Cutii de viteze |
||
|
|
Cutii de viteze |
|||||
|
|
Reductoare de
turaţie |
|||||
|
Obs. |
a.
În cazul în care se impune un parametru de
dimensionare în plan frontal (aw, d1 sau m), se va
determina doar factorul de lăţime ψa, ψd
sau ψm. b.
Valoarea maximă obţinută pentru parametrul de dimensionare rezultată
din cele două condiţii de rezistență (contact şi
încovoiere) şi indică solicitarea preponderentă şi
va fi luată în considerare, în
continuare, pentru stabilirea dimensiunilor angrenajului. |
|||||






AEV-P.1.3.2 Proiectarea formei constructive
Scop:
Concepţia din considerente
funcţionale, constructive
şi/sau tehnologice a configuraţiilor roţilor dinţate.
Tab. AEV-P.1.3.2.1 Parametrii şi relaţii de calcul a
parametrilor principali ai angrenajului [Moldovean, 2002; Rădulescu, 1985]
|
Parametrul din predi- mensionare |
Calculul modulului normal |
Standardiz.
modulului normal |
Calculul distanţei dintre axe şi a unghiului de angrenare în plan frontal |
Adoptarea (opţional) distanţei
dintre axe
aw standard
(fer.
AEV-P.1.4)
|
Determinarea coeficienţilor deplasărilor danturilor |
Calculul parametrilor geometrici principali
ai angrenajului |
|
d1 |
(fer. AEV-C.1.6) |
mn (fer. AEV-P.1.4) |
(fer.
AEV-C.1.9)
(fer.
AEV-C.1.10) |
Deoarece compensarea distanţei se face prin deplasări ale danturilor, se recomandă: aw - a ≤ (2…2,2) mn, dacă aw > a (deplasări plus) şi │ aw - a │ ≤ 0,4 mn, dacă aw < a (deplasări minus). Dacă nu se
îndeplinesc aceste restricţii se recomandă recalcularea
valorii distanţei dintre axe, a, prin modificarea parametrilor z1
şi/sau β
(fer.
AEV-C.1.9). Se calculează unghiul real angrenare:
(fer. AEV-C.1.11),
(fer. AEV-C.1.12),
|
a. Distanţa dintre axe nestandard: se adoptă coeficienţilor deplasărilor
xn1 şi xn2 din considerente de eficienţă
funcţională
(fer.
AEV-P.1.5); b. Distanţa dintre axe standard: cunoscând xsn = xn1+xn2, se calculează/aleg coeficienţii deplasărilor xn1 şi xn2 din considerente de eficienţă funcţională şi constructivă (fer. AEV-P.1.5). |
Pentru cazul b
αwt se va determină din
tab. AEV-T.1-1 din fer. AEV-T.1),
(fer. AEV-C.1.15). Pentru cazurile a, b
(fer. AEV-C.1.16). Verificare (dw1+ dw2)/2 = aw;
(fer. AEV-C.1.17) |
|
m |
(fer. AEV-C.1.7) |
|||||
|
a |
(fer. AEV-C.1.8) |
|||||
|
Obs.
Pentru dantură dreaptă se consideră: β = 0, mn =
m, xn1,2 = x1,2; αn = α; αwt
= αw. |
||||||

Tab.
AEV-P.1.3.2.2
Schema
cinematică. Formele pinionului şi roţii [Rădulescu, 1986]
|
|
a |
c |
Schema cinematică se realizează la scara 1:1 şi
oferă o imagine grafică de ansamblu a viitorului angrenaj. Calculul
aproximativ al diametrelor arborilor care susţin roţile,
Calculul
aproximativ al lungimilor butucilor
din condiţia de rezistenţă a penelor paralele,
Recomandări
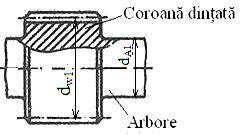
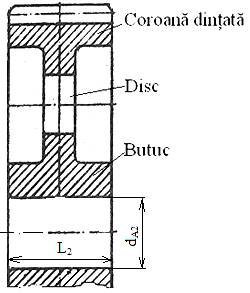
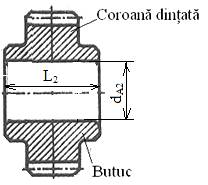
de configurare a formelor roţilor dinţate cilindrice: Roţile dinţate cu dimensiune
radială mică au numai partea de coroana dinţată (discul
şi butucul inexistente, fig.
AEV.P.1.3.2.2,a; v.
fer. AEV-S.1.1) cvasiegală cu dimensiunile arborelui, dA< (0,8…1) dw1
şi se execută corp comun cu arborele. Roţile cu dimensiune radială medie au coroană dinţată şi butuc (discul inexistent; fig. AEV.P.1.3.2.2,b; v. fer. AEV-S.1.1). Roţile cu dimensiune radială mare au coroană dinţată, disc şi butuc (fig. AEV-P.1.3.2.2,c; v. fer. AEV-S.1.1) |
|
b |
|||
|
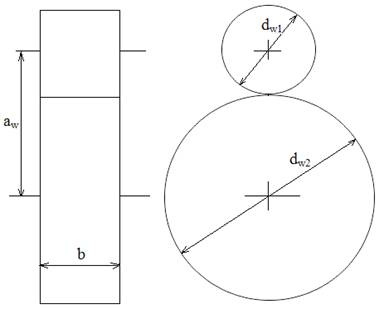
Fig. AEV-P.1.3.2.1
Schemă cinematică |
Fig. AEV-P.1.3.2.2 Formele
roţilor dinţate cilindrice: a
– roţi de dimensiuni mici; b - roţi de dimensiuni
medii; c - roţi de dimensiuni mari |
||

AEV-P.1.4
DIMENSIONARE ŞI VERIFICARE
Tab.
AEV-P.1.4.1 Calculul
parametrilor geometrici şi a factorilor de corecţie [Moldovean, 2002;
Rădulescu, 1986; Filipoiu, 2006]
|
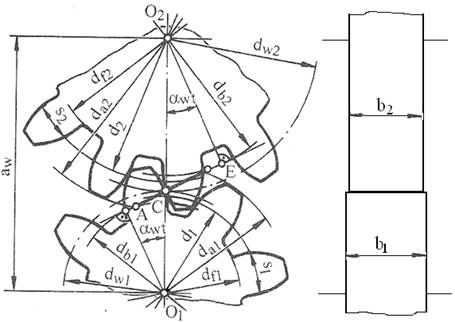
Fig. AEV-P.1.4.1 Parametri
geometrici principali ai roţilor |
Succesiunea etapelor |
|||||||
|
a.
Stabilirea şi calculul elementelor
geometrice cu
fer.
AEV-C.1.3 (v.
fer.
AEV-T.1.2,
pentru dantură înclinată sau fer.
AEV-T.1.1, pentru dantură
dreaptă) sau cu pachetul MDESIGN (v. subcap.
AEV-A1.6;
AEV-A.2.6). b.
Determinarea vitezei periferice a
angrenajului (în polul
angrenării), c.
Adoptarea treptei de precizie, procedeului
de prelucrare şi rugozităţilor (fer.
AEV-P.1.6; fer. AEV-F.11). d.
Adoptarea vâscozităţii şi
tipului lubrifiantului (fer. AEV-F.12). e.
Readoptarea factorilor de lăţime Ψa, Ψm,
Ψd (fer.
AEV-P.1.3). f. Stabilirea lăţimilor danturilor roţilor: b2=Ψd d1; b2=Ψm m sau b2=Ψa aw; b1 = b2 + (1…5) mm (fer. CEL-C.1). g.
Determinarea factorilor de corecţie dependenţi de dimensiunile
angrenajului real şi virtual: |
||||||||
|
Kv |
(fer. AEV-F.3) |
KHβ |
(fer. AEV-F.4) |
KFβ |
(fer. AEV-F.4) |
KHα |
(fer. AEV-F.5) |
|
|
Zε |
(fer. AEV-F.6) |
Yε |
(fer. AEV-F.6) |
Yβ |
(fer. AEV-F.9) |
ZL |
(fer. AEV-F.12) |
|
|
ZR, YR1,2 |
(fer. AEV-F.11) |
Zv |
(fer.AEV-F.10) |
Zw |
(fer. AEV-F.9) |
Zx |
(fer. AEV-F.8) |
|
|
ZH, YFa1,2 |
(fer. AEV-F.7) |
YSa1,2 |
(fer.AEV-F.15) |
Yδ1,2 |
(fer. AEV-F.15) |
Yx |
(fer. AEV-F.8) |
|
Tab. AEV-P.1.4.2 Calcule de verificare şi/sau dimensionare (v. cap.
AEV-T.2.1 pentru angrenajele cilindrice cu dantură
dreaptă sau
AEV-T.2.2 pentru angrenajele cilindrice cu dantură
înclinată)
|
Calculul
parametrilor de verificare/redimensionare |
|||
|
Tensiunea
efectivă maximă de contact |
Tensiunile
efective maxime de încovoiere |
||
|
|
(fer. AEV-C.1.19) |
|
(fer. AEV-C.1.19) |
|
Factorul de siguranţă la solicitarea de contact |
Factorii de siguranţă la solicitarea de
încovoiere |
||
|
|
(fer. AEV-C.1.20) |
|
(fer. AEV-C.1.20) |
|
Verificare |
|||
|
SF = min(SF1, SF2) ≥ SFmin, pentru SHmin şi SFmin adoptat (fer. AEV-F.1) |
Cazuri posibile: a.
cele două
inegalităţi sunt respectate cu abateri reduse sau cel puţin
una cu abatere redusă, solicitările sunt verificate apropiat sau,
respectiv, cel puţin una este cu verificare apropiată, şi angrenajul
nu este supradimensionat major şi se poate trece la următorul pas
(tab. AEV-P.1.4.3) b.
cele două
inegalităţi sunt respectate cu abateri majore, solicitările
sunt verificate, angrenajul este
supradimensionat major şi este posibil, în cazuri bine definite, să
rămână nemodificat sau să se modifice angrenajul făcând o
dimenionare (v. mai jos) c.
una din inecuaţii nu este
respectată, una din solicitări nu este verificată şi se
va face o dimensionare ca mai jos |
||
|
Dimensionare (opţional) |
|||
|
Modificarea materialului sau a duratei de funcţionare |
|||
|
Condiţia de redimensionare (una din condiţiile de
verificare neîndeplinită sau cu abatere majoră tranformată în
egalitate): SH =SHmin
sau S1,2 =SFmin
conduce la
următoarele cazuri: |
|||
|
a.
modificarea tratamentului
termic şi/sau a materialului pornind de la una din relaţiile:
readoptarea durităţii, a tratamentului termic
sau a materialului şi tratamentului termic şi reluarea calculului
de verificare de la punctul f din tab. AEP-P.1.4.1. b.
modificarea duratei de
funcţionare pornind de la una din relaţiile (se aplică numai în cazul
duratei de funcţionare limitată, ZN >1 şi YN1,2
>1):
determinarea numărului de
cicluri de solicitare NL= min (NLH,
NLF), unde NLH şi NLF se determină
din fer. (fer.
AEV-F.13), dependent de
|
|||
|
Modificarea dimensională a angrenajului |
|||
|
a.
modificarea
lăţimii danturii, b în domeniul ± 20…25% (respectarea restricţiilor
impuse factorilor de lăţime); reluarea calculului de verificare de
la punctul e din tab.
AEP-P.1.4.1 b.
modificarea dimensiunilor
angrenajului în plan frontal: distanţa dintre axe, diametrul pinionului sau
modulul (se aplică numai în cazul când acesta nu se impune); reluarea
calculului de la subcap. AEV-P.1.4 |
|||
Tab. AEV-P.1.4.3 Calculul
forţelor din angrenaj (v.
cap.
AEV-T.2.1 pentru angrenajele cilindrice cu dantură
dreaptă sau
AEV-T.2.2 pentru angrenajele cilindrice cu dantură
înclinată)
|
Relaţiile de calcul a forţelor (fer. AEV-C.1.24) |
Obs. |
|||
|
Ft
[N] |
Fr
[N] |
Fa
[N] |
Fn
[N] |
|
|
|
|
|
|
Pentru angrenaje cu
dantură dreaptă: β=0, dw1= d1, αwt=
αw |
AEV-P.1.5 PROIECTAREA
FORMEI TEHNOLOGICE. DESENE DE EXECUŢIE
Configurarea
roţilor dinţate se face având la bază principiile
proiectării elementelor mecanice, precum şi recomandările din
fer.
AEV-P.1.3.2. Lungimea butucului se determină în funcţie de lungimea
asamblării arbore-butuc (v. fer. AEV-CX.2
pentru asamblarea cu
pană paralelă).
Tab. AEV-P.1.5.1 Toleranţe, ajustaje şi
abateri tehnologice
|
Succesiunea
etapelor de determinare şi alegere a ajustajelor, toleranţelor
şi abaterilor |
|||
|
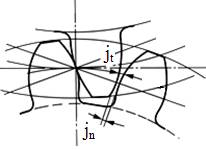
a.
Determinarea jocului minim necesar (fig.
AEV-P.1.5.1,a,b),
b. Alegerea tipului ajustajului roţilor în
angrenare se face din
condiţia de realizare a jocului (fer. AEV-P.1.7) prin adoptarea unui
ajustaj din cele şase (A, B, C, D, E, H) în corespondenţă
şi cu distanţa dintre axe a angrenajului. c.
Alegerea tipurilor toleranţei jocului
dintre flancuri şi a treptei de precizie pentru abaterea distanţei
dintre axe se face în
corelaţie cu tipul ajustajului (fer. AEV-P.1.7). Pentru jocul dintre
flancuri se poate alege toleranţa a, b, c, d sau h iar treapta de
precizie pentru abaterea distanţei dintre axe poate fi VI, V, IV, III,
II. d. Alegerea criteriilor şi indicilor de
precizie precum şi a abaterilor Indicii de precizie pentru roţile unui angrenaj
se aleg raportându-se la următoarele criterii: preciziei cinematice, de
funcţionare lină, contactului
dintre dinţi şi jocului
dintre flancuri iar indicii de precizie pentru angrenaj la criteriile: contactului dintre dinţi şi jocului dintre flancuri. În tabelele din fer. (fer. AEV-P.1.7) se prezintă indicii de precizie
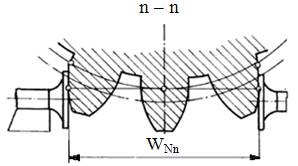
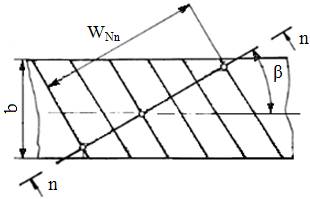
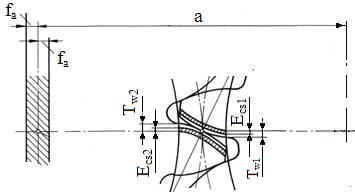
principali corespunzători criteriului jocului dintre flancuri: abaterea minimă a cotei peste
dinţi, Ews;
toleranţa cotei peste dinţi, Tw;
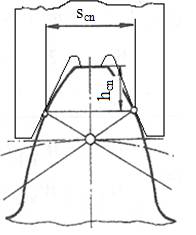
abaterea minimă a grosimii dintelui pe coarda constantă, - Ecs; toleranţa
grosimii dintelui pe coarda constantă, Tc – pentru roţi – şi abaterile limită
ale distanţei dintre axe fa
– pentru angrenaj (fig. AEV-P.1.5.1). Obs.
Marcarea abaterilor pe desenele de execuţie:
|
|||
|
|
|
|
|
|
a |
b |
||
|
c |
|||
|
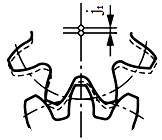
Fig. AEV-P.1.5.1
Jocuri şi abateri tehnologice [Roloff/Matek, 2008/: a – jocul dintre flancuri în
plan frontal şi normal; b -
jocul radial; c – abaterile
şi toleranţele (grosimii
dintelui şi distanţei dintre axe) |
a |
b |
|
|
Fig.
AEV-P.1.5.2 Parametri
principali de conformitate ai
danturii [Filipoiu, 2006]: a – cota
peste dinţi; b – coarda constantă |
|||
Tab. AEV-P.1.5.2 Elaborarea desenelor de
execuţie
|
|
|
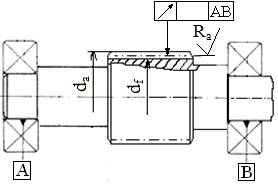
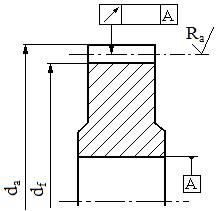
Specificaţii de execuţie înscrise pe desen ( fig. AEV-P.1.5.1) |
|
|
a.
Cote dimensionale:
diametrul cercului de cap, da;
diametrul cercului de picior, df
(opţional); lăţimea danturii, b. b. Simboluri de evidenţiere a abaterilor
de formă:
cilindricitate a suprafeţei de divizare c.
Simboluri de abateri de poziţie: bătaie radială (concentricitate) a danturii
(suprafaţa cilindrului de divizare) în raport cu suprafaţa
(suprafeţele) de rezemare de rotaţie, simbolizate şi marcate
cu A sau cu A şi B; bătaie frontală a suprafeţelor de
rezemare în raport cu suprafaţa (suprafeţele) de rezemare de
rotaţie simbolizate şi marcate cu A sau A şi B. d. Simboluri de calitatea suprafeţei: danturii şi suprafeţelor de
rezemare cilindrice şi frontale. Specificaţii înscrise tabelar pe desenul de
execuţie sau ataşat
(fer. AEV-P.1.8): modulul normal, mn;
modulul frontal, mt; numărul de dinţi, z; unghiul de
înclinare, β; direcţia înclinării dinţilor (dreapta sau
stânga); profilul de referinţă; coeficientul deplasării
profilului, x; treapta de precizie şi jocul, conform STAS 6273; lungimea
peste N dinţi, WNn ; diametrul de divizare, d;
înălţimea dintelui, h; toleranţe şi abateri. |
|||
|
a |
b |
|
|
|
Fig. AEV-P.1.5.1
Principalele specificaţii de execuţie a roţilor: a
- pentru pinion corp comun cu
arborele; b – pentru roată |
|||
AEV-P.1.6 VERIFICAREA
MODELULUI CU PACHETUL PERFORMANT MDESIGN
Verificarea modelelor
se face pe cazuri concrete: subcap.
AEV-A.1.6, pentru angrenaje cilindrice cu distanţa dintre axe
neimpusă; subcap. AEV-A.2.6 - angrenaje cilindrice cu distanţa dintre axe impusă.