AEV.
ANGRENAJE EVOLVENTICE
AEV-A. ANGRENAJE EVOLVENTICE - APLICAŢII
AEV-A.2 ANGRENAJE CONICE – APLICAŢII
AEV-A.2.1 ANGRENAJE CONICE CU DANTURĂ DREAPTĂ - APLICAŢIE
|
CUPRINS |
|
AEV-A.2.1.1 DATE DE PROIECTARE AEV-A.2.1.2 ALEGEREA MATERIALELOR, TRATAMENTELOR
TERMICE ŞI TEHNOLOGIEI AEV-A.2.1.3 PREDIMENSIONARE ŞI PROIECTAREA
FORMEI CONSTRUCTIVE AEV-A.2.1.3.1 Predimensionare AEV-A.2.1.3.2 Proiectarea formei
constructive AEV-A.2.1.4 DIMENSIONARE ŞI VERIFICARE AEV-A.2.1.5 PROIECTAREA FORMEI TEHNOLOGICE. DESENE
DE EXECUŢIE AEV-A.2.1.6 VERIFICAREA
MODELULUI CU MDESIGN |
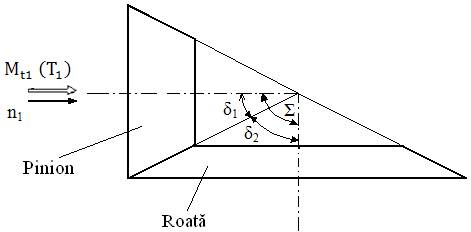
Să se proiecteze angrenajul unui reductor conic într-o
treaptă, cunoscând schema din fig. AEV-A.2.1.1 şi datele din tab.
AEV-A.2.1.1. Rezolvarea acestei probleme se face parcurgând metodologia din cap. AEV-P.2 cu centralizarea rezultatelor
parţiale şi finale în lista AEV-L.2
(se activează
cu tasta Ctrl apăsată)
AEV-A.2.1.1 DATE
DE PROIECTARE
Tab. AEV-A.2.1.1 Definirea problemei de proiectare a unui
angrenaj conic ortogonal
|
Fig.
AEV-A.2.1.1 Schema
structurală a angrenajului conic ortogonal cu dantură
dreaptă |
Date iniţiale |
|
a.
Turaţia la intrare (pinion),
n1 = 960 rot/min. b.
Puterea la intrare, P1 = 7,5 [kW] şi din fer.
AEV-C.1
rezultă valoarea momentului de torsiune, c.
Raportul de angrenare,
u = 4. d.
Unghiul dintre axele roţilor, Σ = 90o şi din
fer. AEV-C.2.1 se determină semiunghiurile, e.
Numărul de angrenaje identice în paralel, χ =1. f.
Durata de funcţionare, Lh = 7000 ore. g.
Tipul danturii, dreaptă. h.
Condiţii de funcţionare: maşina motoare – motor asincron; instalaţia antrenată – utilaj
tehnologic într-o carieră de piatră, temperatura – (-25…50)oC;
caracteristicile mediului – praf şi umezeală ridicată. i.
Condiţii ecologice: utilizarea de materiale şi tehnologii eco, reciclarea
materialelor, protecţia vieţii |
AEV-A.2.1.2 ALEGEREA MATERIALULUI, TRATAMENTELOR TERMICE
ŞI TEHNOLOGIEI
|
Tab. AEV-A.2.1.2.1 Materialul, tratamentul termic şi
caracteristicile de rezistenţă specifice solicitărilor
angrenajului şi roţiilor (v. subcap.
AEV-P.2.2;
fer.
AEV-M.1) |
||||||
|
Materialul |
Tratamentul
termic |
Fluxul
tehnologic |
Durităţile
flancurilor |
Duritatea
miezului |
Tensiunea
limită la contact,
σHlim
[MPa] |
Tensiunea
limită la încovoiere,
σFlim [MPa] |
|
13CrNi33 |
Cementare (carburare +călire+revenire
joasă) |
Prelucrare dantură prin aşchiere:
strunjire, frezare sau mortezare dantură + cementare + rectificare
dantură |
HRC1= HRC2= 58 |
HB1= HB2 = 310 |
1450 |
400 |
|
Alte
caracteristici: σr = 950 MPa, σ02 = 750 MPa, E = 210000 MPa, ν = 0,3 |
||||||
AEV-A.2.1.3
PREDIMENSIONARE ŞI PROIECTAREA FORMEI CONSTRUCTIVE
AEV-A.2.1.3.1 Predimensionare (v. subcap. AEV-P.2.3)
Scop: determinarea
preliminară a modulului exterior, me, necesar pentru
proiectarea formei şi întocmirea schemei de calcul de
verificare/dimensionare (etape care nu se pot derula deoarece unii parametri nu
sunt evaluabili la început).
Tab. AEV-A.2.1.3.1 Parametri şi relaţii de predimensionare
|
Condiţia
impusă |
Parametrii
din relaţiile de calcul |
Relaţiile
de calcul |
||
|
Rezistenţă
la solicitarea de contact |
z1 = 15
(fer.
AEV-P.2.1); z2 = u z1
= 60; KA=1,25
(fer. AEV-F.2); Kv = 1,1
(fer. AEV-F.3); ψd =0,6 (fer.
AEV-P.1.3)(v. fer.
AEV-P.2.1); NL1=60 n1 Lh χ = 4,03 .108 cicluri (fer. AEV-C.1.5); NL2=60n1 Lh χ /ur = 1,64.108 cicluri (fer. AEV-C.1.5); |
KHβ =1,3
(fer. AEV-F.4); KHα =
1,3 (fer. AEV-F.5); Zε =
0,96 (fer. AEV-F.6); ZH = 2,5
(fer. AEV-F.7); ZE = 190
MPa1/2 (fer. AEV-F.14); SHmin=
1,15 (fer. AEV-F.1); ZN =
max(ZN1, ZN2) =1, ZN1,2 din
fer. AEV-F.13; σHP =
σHlim ZN /SHmin |
|
(fer. AEV-C.2.2) |
|
Rezistenţă
la solicitarea de încovoiere |
KFβ =
1,15 (fer.
AEV-F.4); KFα =
1,3 (fer.
AEV-F.5); Yε
= 0,9 (fer.
AEV-F.6); Yβ
= 0,95 (fer.
AEV-F.9); YSa1=1,57 (fer. AEV-F.15); YSa2=1,76
(fer. AEV-F.15) YFa1 =
2,75 (fer.
AEV-F.7); YFa2 =
2,2 (fer.
AEV-F.7); SFmin =
1,5 (fer.
AEV-F.1); YN1,2 = 1 (fer. AEV-F.13); YST = 2; σFP1,2 =
σFlim YST
YN1,2/ SFmin |
|
(fer. AEV-C.2.3) |
|
|
Obs. Solicitarea
preponderentă este de contact, deoarece max(3,162; 2,8) = 3,162
mm |
||||


AEV-A.2.1.3.2 Proiectarea formei constructive
Scop:
Conceperea din considerente
funcţionale, constructive şi/sau
tehnologice a configuraţiilor roţilor dinţate.
Tab. AEV-P.2.1.3.2.1 Parametrii şi relaţii de calcul a parametrilor principali ai angrenajului
|
Parametrul din predi- mensionare |
Modulul frontal normal |
Standardizarea modulului exterior |
Adoptarea coeficienţilor
deplasării danturii |
Calculul parametrilor geometrici principali
ai angrenajului |
|
|
me=
3,162 mm |
|
me = 4
mm; me (fer. AEV-P.1.4) |
Factorii
deplasărilor radiale,
(fer. AEV-C.2.5) Factorii
deplasărilor tangenţiale,
|
Diametrele de divizare exteriore,
Lungimea generatoarei conului
exterior,
Lăţimea danturii, |
(fer. AEV-C.2.6) |
|
Obs.
Pentru dantură dreaptă se consideră: βm=0 |
|||||
Tab. AEV-A.2.1.3.2.2 Schema
cinematică. Formele pinionului şi roţii
|
|
a |
b |
Schema cinematică din fig. AEV-A.3.3.1,
reprezentată la scara 1:1, evidenţiază grafic structura
raţională din punct de vedere al proporţiilor a angrenajului. Calculul aproximativ al
diametrelor arborilor care susţin roţile:
(fer. AEV-CX.1) Se adoptă dA1= 30 mm; dA2
= 60 mm (tronsonul arborelui pe care se montează roata este mai mare
decât cel al capului arborelui). Calculul aproximativ al
lungimilor butucilor roţilor:
(fer. AEV-CX.2) Recomandări
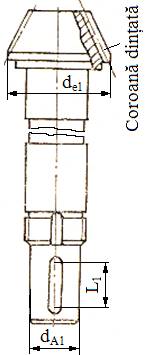
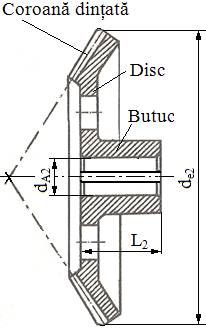
de configurare a formelor roţilor dinţate conice: Pinionul este o roată
dinţată cu dimensiune radială mică are numai
partea de coroană (discul şi butucul sunt inexistente, fig.
AEV-A.3.3.2,a) cvasiegală cu dimensiunile arborelui (dA1 = 30
mm < de1 = 60) şi se execută corp comun cu arborele. Roata (AEV-A.3.3.2,b) are dimensiune radială mare şi se poate configura cu trei
părţi: coroană dinţată, disc (cu găuri de
uşurare) şi butuc. |
|
Fig. AEV-A.2.1.3.2.1
Schema cinematică a
angrenajului conic |
Fig. AEV-A.2.1.3.2.2 Formele
roţilor dinţate conice: a
– arbore cu pinion; b – roată |
||
AEV-A.2.1.4
DIMENSIONARE ŞI VERIFICARE
Tab. AEV-A.2.1.4.1 Calculul
parametrilor geometrici şi a factorilor de corecţie
|
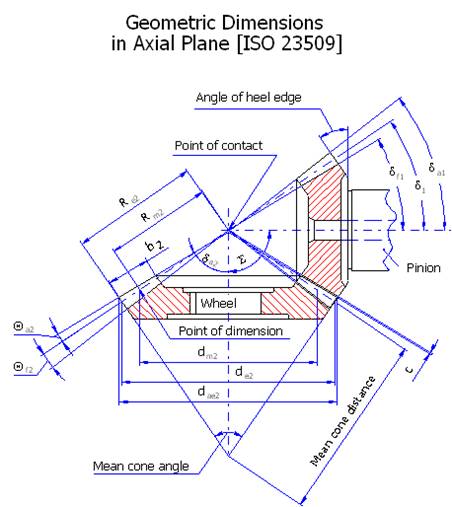
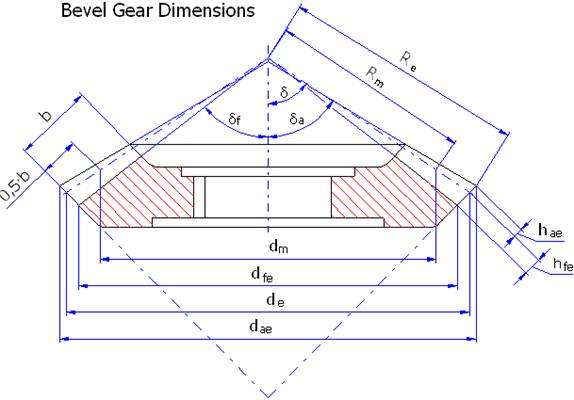
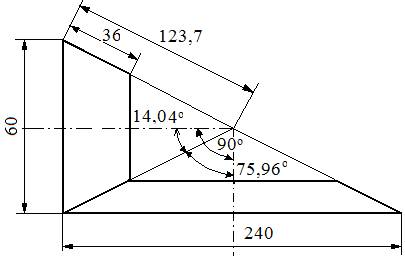
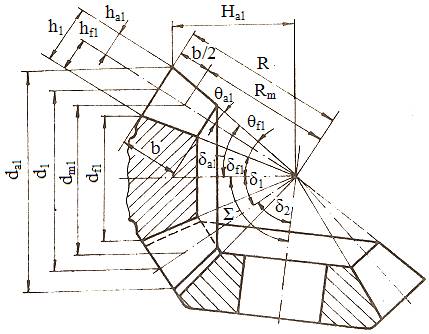
Fig. AEV-A.2.1.4.1 Parametrii geometrici principali ai angrenajului conic ortogonal şi ai roţilor |
Determinarea parametrilor de calcul: a. Stabilirea şi calculul principalelor
elemente geometrice conform relaţiilor din
fer.
AEV-C.2.7
(v.
fer.
AEV-T.2.1); calculul geometric se poate face şi cu pachetul
performant MDESIGN
(v. subcap.
AEV-A.3.6) b. Determinarea vitezei periferice a
angrenajului (în polul
angrenării exterior), c.
Adoptarea treptei de precizie, procedeului
de prelucrare şi rugozităţilor: treapta de precizie 8, frezare de finisare, rugozitate flancuri active Ra =
1,6 μm, rugozitate zone de racordare Ra = 3,2 μm (fer.
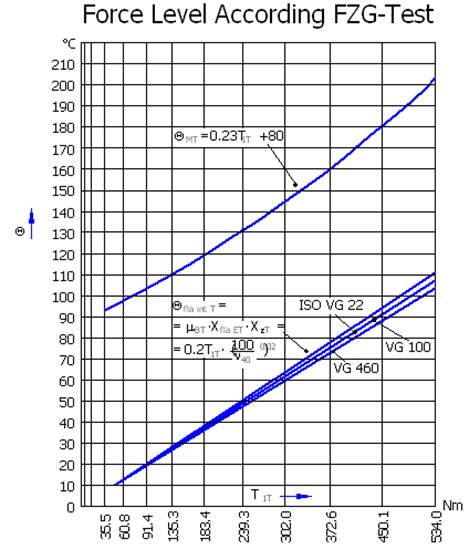
AEV-P.1.6; fer. AEV-F.11). d. Adoptarea vâscozităţii şi
tipului lubrifiantului TIN
300 EP (fer. AEV-F.12). e.
Readoptarea factorului de lăţime Ψd = 0,6 (fer.
AEV-P.1.3). f. Stabilirea lăţimilor roţilor: b=Ψd de1 = 36 mm, b < 0,35Rm (fer. CEL-C.1). Determinarea factorilor de corecţie dependenţi de dimensiunile angrenajelor real şi virtual: |
|||||||
|
Kv =1,1 |
(fer. AEV-F.3) |
KHβ =1,42 |
(fer. AEV-F.4 |
KFβ =1,25 |
(fer. AEV-F.4) |
KHα =
1,3 |
(fer. AEV-F.5) |
|
|
KFα =
1,2 |
(fer. AEV-F.5) |
Zε = 0,95 |
(fer. AEV-F.6) |
Yε = 0,85 |
(fer. AEV-F.6) |
Yβ = 1 |
(fer. AEV-F.9) |
|
|
ZL = 1,1 |
(fer. AEV-F.12) |
ZR = 1 |
(fer. AEV-F.11) |
Zv = 0,97 |
(fer.
AEV-F.10); |
Zw = 1 |
(fer. AEV-F.9) |
|
|
Zx = 1 |
(fer. AEV-F.8) |
ZH = 2,5 |
(fer. AEV-F.7) |
YFa1 =
2,75 |
(fer. AEV-F.7) |
YFa2 =
2,15 |
(fer. AEV-F.7) |
|
|
YR1 = 1 |
(fer.
AEV-F.11); |
YR2 = 1 |
(fer. AEV-F.11) |
YSa1 =
1,55 |
(fer. AEV-F.15) |
YSa2 =
1,9 |
(fer. AEV-F.15) |
|
|
Yδ1 =1 |
(fer. AEV-F.15) |
Yδ2 = 1 |
(fer. AEV-F.15) |
Yx1 = 1 |
(fer. AEV-F.8) |
|
|
|
Tab. AEV-A.2.1.4.2 Calcule de verificare şi/sau dimensionare
(v. tab. AEV-P.2.4.2)
|
Calculul
parametrilor de verificare/redimensionare |
|
|
Tensiunea efectivă maximă de contact |
Tensiunile efective maxime de încovoiere |
|
|
|
|
Factorul de siguranţă la solicitarea de contact |
Factorii de siguranţă la solicitarea de
încovoiere |
|
|
|
|
Verificare |
|
|
SH ≥ SHmin (1,74 >1,15), SF = min(SF1, SF2) ≥ SFmin (8,78 > 1,5), pentru SHmin şi SFmin (v. fer. AEV-F.1) |
Obs. Cele
două inegalităţi sunt respectate cu abateri reduse
solicitările sunt verificate apropiat, angrenajul nu este
supradimensionat major şi nu se impune dimensionare. |
Tab. AEV-A.2.1.4.3 Calculul forţelor din angrenajul conic
|
Relaţiile
de calcul a forţelor
(fer. AEV-C.2.9; βm=0; v. tab.
AEV.P.2.4.3) |
|||
|
Ft
[N] |
Fr1,2
[N] |
Fa1,2
[N] |
Fn
[N] |
|
|
|
|
|
AEV-A.2.1.5
PROIECTAREA FORMEI TEHNOLOGICE. DESENE DE EXECUŢIE
|
Configurarea formelor tehnologice ale roţilor |
||
|
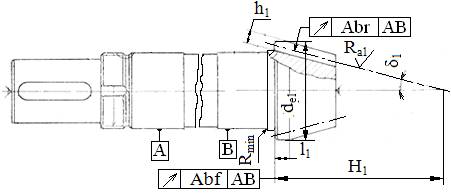
Pinionul, se
execută din semifabricat laminat prin strunjirea corpului urmată de
frezarea danturii. În acest caz se adoptă raza de racordare, Rmin
= 1,5 mm, la saltul dintre arbore şi coroana dinţată (fig
AEV-A.2.1.5.1,a). Roata
conică se execută
din semifabricat forjat (fig. AEV-A.2.1.5.1,b), prelucrat prin strunjire,
urmată de frezarea danturii. Lungimea butucului se determină în
funcţie de lungimea asamblării arbore-butuc (pentru asamblarea cu
pane paralele, v. fer. AEV-CX.2). |
||
|
|
|
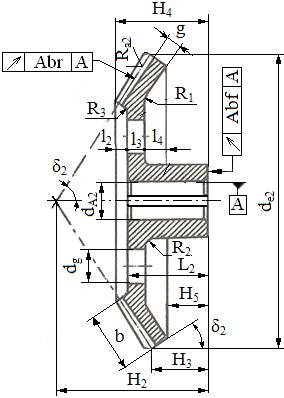
Specificaţii
pentru execuţie înscrise pe desen: a.
Cote dimensionale: diametrul exterior al cercului de cap, da2;
cotele H2,3,4,5, l2;
lăţimea danturii,
b. b.
Simboluri de evidenţiere a
abaterilor de poziţie: bătaie radială (concentricitate)
a danturii (suprafaţa conului de divizare) în raport cu suprafaţa
(suprafeţele) de rezemare de rotaţie simbolizate şi marcate cu
A sau cu A şi B; bătaie frontală a suprafeţelor de
rezemare în raport cu suprafaţa (suprafeţele) de rezemare de
rotaţie simbolizate şi marcată cu A sau cu A şi B. c.
Simboluri de calitatea
suprafeţei: danturii şi suprafeţelor de rezemare
cilindrice şi frontal. Specificaţii
pentru execuţie înscrise tabelar pe desen sau ataşat: modulul
exterior, me; numărul
de dinţi, z; unghiul de înclinare al danturii, β; direcţia
înclinării dinţilor (dreapta sau stânga); profilul de
referinţă; coeficientul deplasării radiale a danturii, xsm;
treapta de precizie şi jocul conform STAS 6273; grosimea dintelui la
exterior; înălţimea dintelui la exterior. |
|
a |
b |
|
|
AEV-A.2.15.1 Specificaţii
înscrise pe desenele de execuţie:
a - pinion corp comun cu
arborele; b roată conică |
||
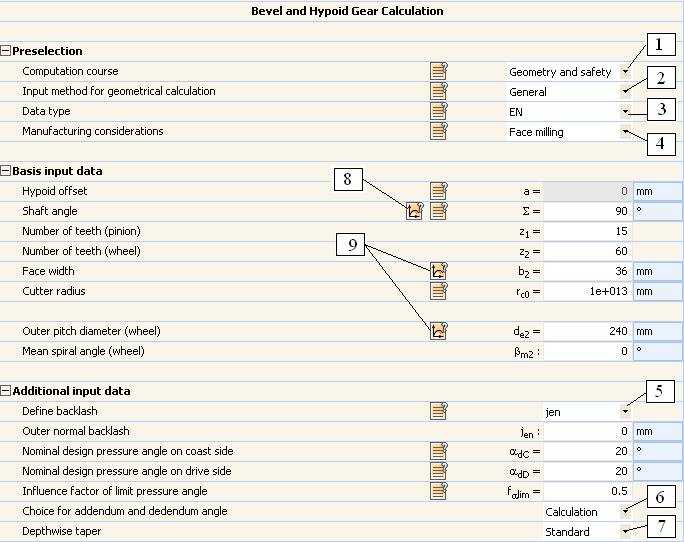
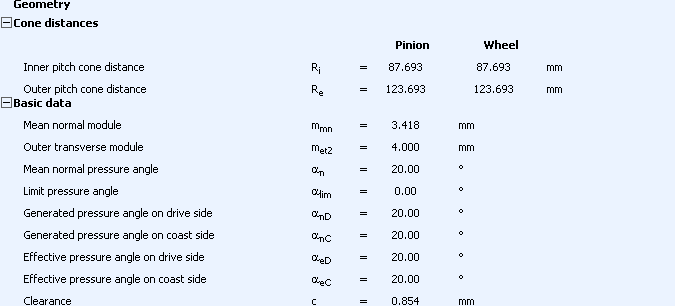
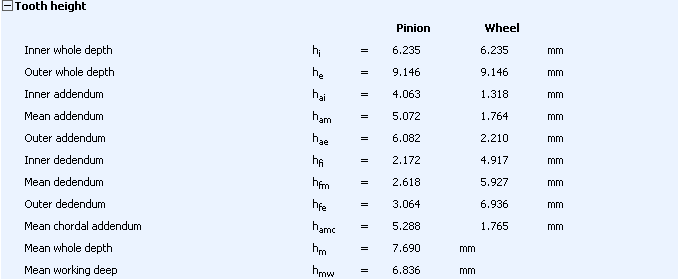
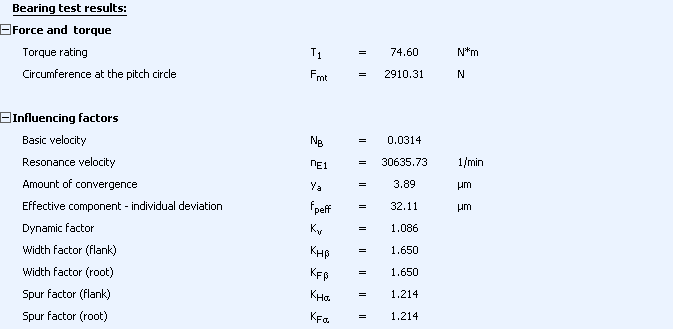
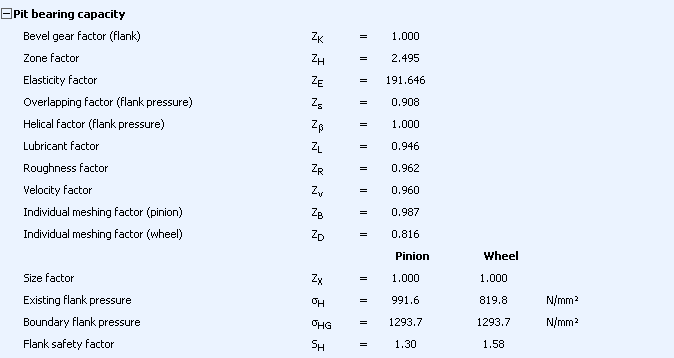
AEV-A.2.1.6 VERIFICAREA MODELULUI
CU PACHETUL PERFORMANT MDESIGN
|
Preprocesarea modelului de
calcul |
||||||||||||
|
|
||||||||||||
|
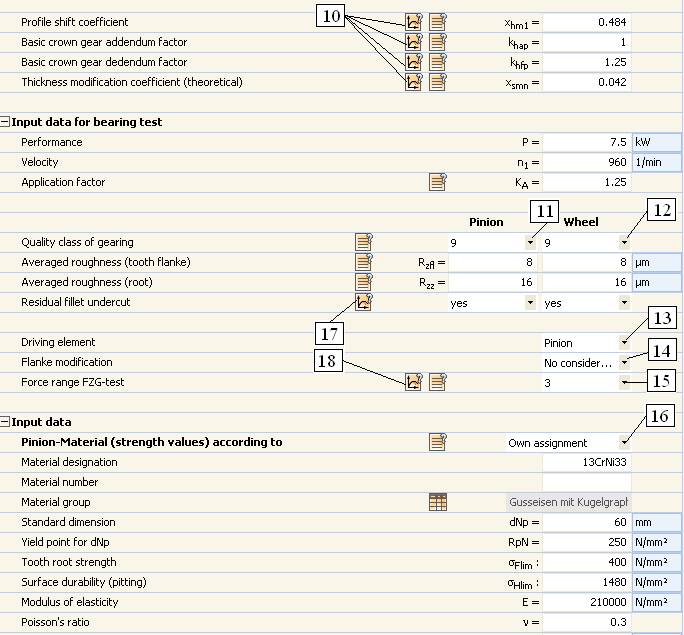
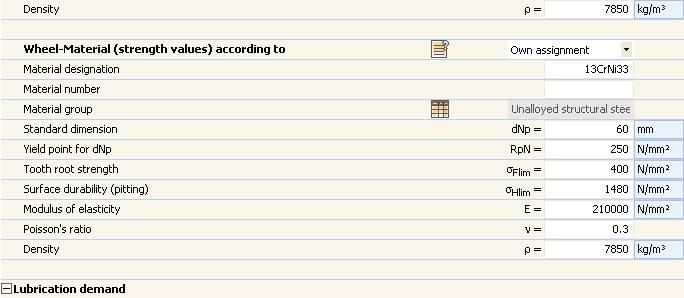
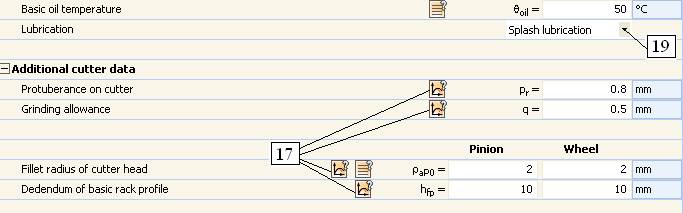
Introducerea datelor şi selectarea
opţiunilor de calcul |
||||||||||||
|
|
|
|||||||||||
|
|
||||||||||||
|
Rezolvarea modelului |
||||||||||||
|
Se activează butonul, |
|
® |
Corectare neconcordanţe sau erori în
datele de intrare (numai dacă apar ferestre de avertzare) |
® |
|
® |
|
® |
|
Se salvează modelul în fișierul
AEV-MD.2 |
||
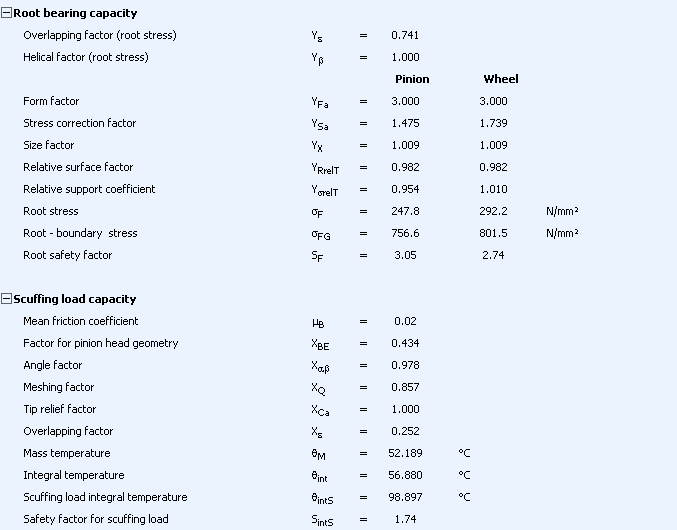
|
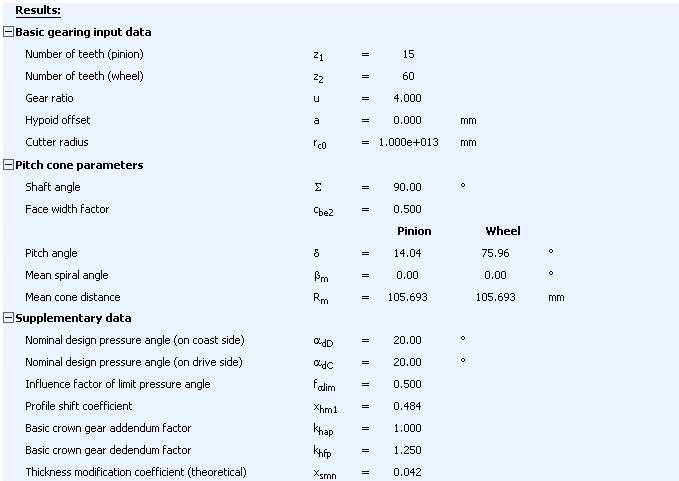
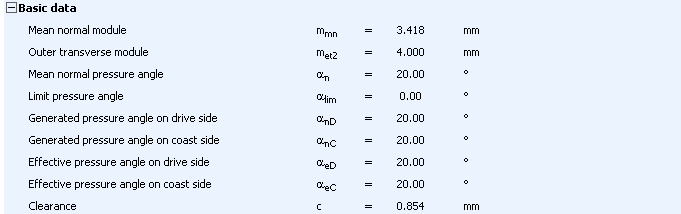
Postprocesarea
rezultatelor (v. fer. ) |
||||||||||||
|
|
|
|||||||||||
|
Obs.
Diferenţele minore
dintre unele valori ale calculelor efectuate cu MDESIGN şi clasic sunt
consecinţa folosirii de standarde şi norme diferite. Se
evidenţiază faptul că prin utilizarea pachetului MDESIGN se
obţin informaţii multiple privind funcţionarea şi
construcţia angrenajului. |
||||||||||||