AEV. ANGRENAJE EVOLVENTICE
AEV-T. STRUCTURA, CONSTRUCŢIA ŞI MODELAREA ANGRENAJELOR EVOLVENTICE
AEV-T.2 MODELAREA ANGRENAJELOR EVOLVENTICE
AEV-T.2.1 MODELAREA ANGRENAJELOR CILINDRICE CU DANTURĂ DREAPTĂ
|
CUPRINS |
|
AEV-T.2.1.1 MODELAREA ÎNCĂRCĂRILOR AEV-T.2.1.2 MODEL DE CALCUL A TENSIUNII DE CONTACT AEV-T.2.1.3 MODEL DE CALCUL A TENSIUNILOR DE ÎNCOVOIERE |
AEV-T.2.1.1 MODELAREA ÎNCĂRCĂRILOR
Tab. AEV-T.2.1.1.1 Relaţii de calcul a forţelor din angrenajul cilindric cu dantură dreaptă
|
|
|
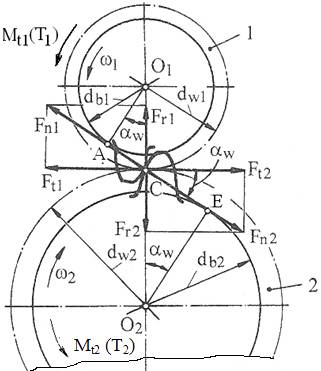
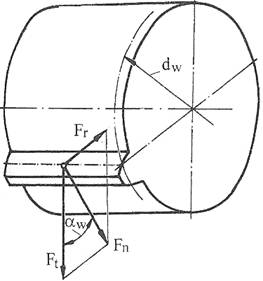
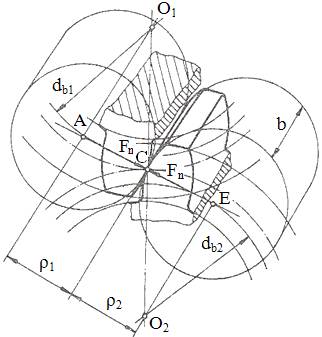
Ipoteze simplificatoare: - forţele normale se consideră aplicate în polul angrenării C la mijlocul roţii (fig. AEV-T.2.1.1.1,b), - se neglijează frecările, - se consideră forţele aplicate static. |
||
|
Tab. AEV-T.2.1.1.1 Relaţiile de calcul a forţelor |
||||
|
Forţa |
Relaţia |
Direcţia şi sensul |
||
|
Forţa tangenţială, Ft = Ft1= Ft2 |
|
Direcţie tangentă la cercurile de rostogolire; sens opus vitezei (forţă rezistentă), pentru roata conducătoare, şi acelaşi sens cu viteza (forţă motoare), pentru roata condusă |
||
|
Forţa radială, Fr = Fr1= Fr2 |
|
Direcţie radială; sensul spre centrul roţii |
||
|
Forţa normală, Fn = Fn1= Fn2 |
Fn =
( |
Direcţie după normala comună a profilelor în contact; sens opus vitezei (forţă rezistentă), pentru roata conducătoare, şi acelaşi sens cu viteza (forţă motoare), pentru roata condusă |
||
|
a |
b |
|||
|
Fig. AEV-T.2.1.1.1 Schema forţelor [Moldovean, 2001]: a – în plan frontal, b - spaţial |
||||
|
Obs. a. Semnificaţiile parametrilor din fig. AEV-T.2.1.1.1: dw1,2 - diametrele cercurilor de rostogolire; db1,2 - diametrele cercurilor de bază; αw - unghiul de angrenare real; ω1,2 - vitezele unghiulare; Mt1 sau T1 – momentul de torsiune al pinionului; Mt2 sau T2 - momentul de torsiune al roţii.
b.
Pentru
angrenajul nedeplasat (αw= α; dw1 = d1):
|
||||
AEV-T.2.1.2 MODEL DE CALCUL A TENSIUNII DE CONTACT
Tab.
AEV-T.2.1.2.1
Modelul
şi relaţia de calcul la contact [Jula, 1989; Moldovean, 2001;
Rădulescu, 1985]
|
a
b
|
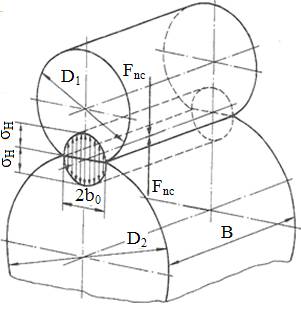
Modelul
de calcul la contact de referinţă [Hertz, 1881] ( fig.
AEV-T.2.1.2.1,a) În zona de contact a doi cilindri cu
diametrele D1,2 şi lungimi B, încărcaţi cu
forţa Fnc, apar tensiuni maxime normale de contact
care, conform lui Hertz, se determină cu relaţia, în care, lk = B, reprezintă lungimea
liniei de contact; curbura redusă (ρ1,2 sunt razele de curbură ale celor doi cilindri, semnul (+) corespunde contactului exterior (fig. AEC-T.1,a), iar semnul (-) contactului interior;
factorul de elasticitate unde E1,2 şi ν1,2
sunt modulele de elasticitate şi, respectiv, coeficienţii
contracţiei transversale (Poisson) ai materialelor celor doi
cilindri (fer. AEV-F.1). Ipotezele
modelului lui Hertz: - materialele cilindrilor sunt omogene, izotrope, elastice după legea lui Hooke; - forţa normală este aplicată static; - tensiunile de contact se repartizează uniform pe lungimea de contact; - lăţimea suprafeţei de contact 2b0, ca rezultat al deformării elastice este foarte mică în raport cu dimensiunile cilindrilor; -
suprafeţele
cilindrilor sunt perfect netede -
nu se
iau în considerare forţele de frecare Diferenţe
între modelul a doi dinţi în angrenare (fig. AEV-T.1, b ) şi modelul
lui Hertz: - razele de curbură ale dinţilor sunt variabile (profilele sunt evolvente); - forţa de interacţiune dintre dinţi nu acţionează static ci variabil dependent de sarcinile dinamice exterioare şi interne; - tensiunile de contact nu sunt uniforme de-a lungul liniei de contact datorită impreciziilor, de execuţie şi montaj şi deformaţiilor elastice ale elementelor angrenajului; -
există
forţe de frecare -
flancurile
nu sunt perfecte, pot avea
rugozităţi diverse Personalizarea parametrilor din relaţia lui
Hertz pentru angrenajul deplasat cu
dinţi drepţi în contact în polul angrenării: Forţa normală de contact,
KA – factorul regimului de
funcţionare, ia în considerare efectul sarcinilor exterioare
variabile (fer. AEV-F.2); Kv – factorul
dinamic interior, ia în considerare sarcinile dinamice interioare (AEV-F.3); KHβ – factorul distribuţiei neuniforme a
sarcinii de-a lungul liniei de contact, specific solicitării de
contact, ia în considerare erorile de execuţie de la direcţia
dintelui şi deformaţiile elastice ale elementelor subansamblului
angrenajului (AEV-F.4); KHα
- factorul repartizării
neuniforme a sarcinii în plan frontal, specific solicitării de
contact, ia în considerare erorile de pas (fer. AEV-F.5). Curbura redusă Ţinând cont că,
Lungimea liniei de contact,
unde b este lăţimea danturii (lungimea dintelui, grosimea roţii); Zε – factorul gradului de acoperire specific solicitării de contact (fer. AEV-F.6) |


|
Tab. AEV-T.2.1.2.2 Relaţii de calcul la contact (forme extinse ale relaţiei de calcul de bază (AEV-T.2.1.2.1)) |
||||||
|
Tensiunea maximă de contact |
Verificare |
Dimensionare |
||||
|
|
(AEV- T.2.1.2.5) |
σHP1,2 – tensiunile admisibile la contact pentru pinion şi, respectiv, roată; σHlim – tensiunea limită la contact (fer. AEV-M.1);
SHmin – factorul minim de
siguranţă la contact
(fer. AEV-F.14) Zx – factorul dimensional (fer. AEV-F.8); Zw – factorul durităţilor (fer. AEV-F.9); Zv – factorul de viteză (fer. AEV-F.10); ZR – factorul rugozităţilor flancurilor (fer. AEV-F.11); ZL – factorul lubrifiantului (fer. AEV-F.12); ZN1,2 – factorii numerelor ciclurilor de solicitare ale pinionului şi roţii (fer. AEV-F.13);
|
|
(AEV- T.2.1.2.9) |
||
|
|
(AEV- T.2.1.2.6) |
|
(AEV- T.2.1.2.10) |
|||
|
|
(AEV- T.2.1.2.7) |
|
(AEV- T.2.1.2.11) |
|||
|
Obs.
a.
În relaţiile din acest
tabel
b.
Pentru angrenajul
nedeplasat (dw1= d1; αw=α): |
||||||

AEV-T.2.1.3 MODEL DE CALCUL A TENSIUNIILOR DE ÎNCOVOIERE
Tab.
AEV-T.2.1.3. Modelul şi relaţia de calcul de
bază la încovoiere [Jula, 1989; Rădulescu, 1985; Moldovean,
2001]
|
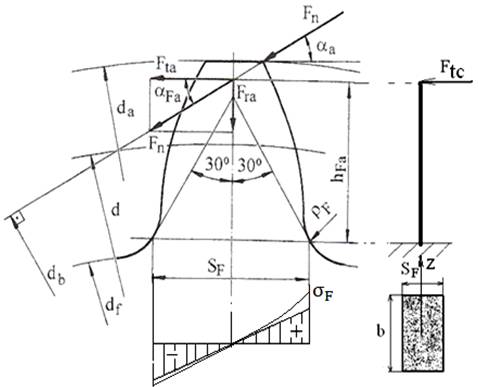
Fig.
AEV-
T.2.1.3.1
Model de calcul la încovoiere al
angrenajului cilindric cu dantură dreaptă |
Ipoteze simplificatoare: -
dintele
se consideră o bară dreaptă
solicitată la încovoiere luând în considerare concentratorul de
tensiune de la baza dintelui (fig.
AEV-T.2.1.3.1), -
forţa
normală se consideră concentrată la vârful dintelui, -
se
neglijează solicitarea de compresiune generată de forţa
radială, -
grosimea
de calcul a dintelui se consideră determinată de două tangente
la pofilele de racordare care fac 30o cu axa dintelui. |
|
Forţa
teoretică de calcul la încovoiere (fig.
AEV-T.2.1.3.1),
unde KA – factorul regimului
de funcţionare, ia în considerare efectul sarcinilor exterioare (fer. AEV-F.2); Kv – factor dinamic interior,
ia în considerare sarcinile dinamice interioare (fer. AEV-F.3); KFβ – factorul
distribuţiei neuniforme a sarcinii de-a lungul liniei de contact,
specific solicitării de încovoiere, ia în considerare erorile de
execuţie de la direcţia dintelui şi deformaţiile elastice
ale elementelor subansamblului angrenajului (fer. AEV-F.4);
KFα - factorul
repartizării neuniforme a sarcinii în plan frontal, specific
solicitării de încovoiere, ia în considerare erorile de pas (fer. AEV-F.5). |
|
|
Relaţia de calcul de referinţă a
tensiunii maxime de încovoiere,
cu solicitarea de
încovoiere (fer. AEV-F.6);
YSa – factorul de concentrare a tensiunilor de încovoiere
la baza dintelui
|

|
Tab. AEV-T.2.1.3.2 Relaţii de calcul la încovoiere (forme extinse ale relaţiei de calcul de bază (AEV- T.2.1.3.2)) |
||||||
|
Tensiunile maxime de încovoiere (1 – pinion, 2- roată) |
Verificare |
Dimensionare |
||||
|
|
(AEV- T.2.1.3.3) |
σFP1,2 – tensiunile admisibile la încovoiere pentru pinion şi roată; σFlim1,2 – tensiunea limită la încovoiere pentru pinion şi roată (fer. AEV-M.1); SFmin – factorul minim de siguranţă la încovoiere (fer. AEV-F.1); YN1,2 – factorul numerelor ciclurilor de solicitare ale pinionului şi roţii (fer. AEV-F.13), YST – factorul tensiunii de încovoiere de refererinţă (YST=2); Yδ1,2 – factorii concentratorilor de tensiuni ai pinionului şi roţii (fer. AEV-F.15); YR1,2 – factorii rugozităţilor racordărilor pinionului şi roţii (fer. AEV-F.11); Yx – factorul de mărime al angrenajului pentru încovoiere (fer. AEV-F.8)
|
|
(AEV- T.2.1.3.8) |
||
|
|
(AEV- T.2.1.3.4) |
|
(AEV- T.2.1.3.9) |
|||
|
|
(AEV- T.2.1.3.5) |
|
(AEV- T.2.1.3.10) |
|||
|
Obs.
a.
Pentru angrenajul nedeplasat (dw1=d1;
αw=α; aw=a):
b.
În relaţiile
din acest tabel: |
||||||