AEV.
ANGRENAJE EVOLVENTICE
AEV-A. ANGRENAJE EVOLVENTICE - APLICAŢII
AEV-A.3 ANGRENAJE MELCATE – APLICAŢII
AEV-A.3.1 ANGRENAJE MELCATE CILINDRICE - APLICAŢIE
|
CUPRINS |
|
AEV-A.3.1.1 DATE DE PROIECTARE AEV-A.3.1.2 ALEGEREA MATERIALELOR, TRATAMENTELOR
TERMICE ŞI TEHNOLOGIEI AEV-A.3.1.3 PREDIMENSIONARE ŞI PROIECTAREA
FORMEI CONSTRUCTIVE AEV-A.1.1.3.1 Predimensionare AEV-A.1.1.3.2 Proiectarea formei
constructive AEV-A.3.1.4 DIMENSIONARE ŞI VERIFICARE AEV-A.3.1.5 PROIECTAREA FORMEI TEHNOLOGICE. DESENE
DE EXECUŢIE AEV-A.3.1.6 VERIFICAREA
MODELULUI CU MDESIGN |
Să se proiecteze angrenajul unui reductor melcat într-o
treaptă, cunoscând schema din fig. AEA-A.4.1 şi datele din tab.
AEV-A.3.1.1.1. Rezolvarea acestei probleme se face parcurgând metodologia din cap. AEV-P.3 cu centralizarea rezultatelor
parţiale şi finale în lista AEV-L.2
(se activează
cu tasta Ctrl apăsată)
AEV-A.3.1.1 DATE
DE PROIECTARE
Tab. AEV-A.3.1.1.1
Definirea problemei de proiectare a unui
angrenaj melcat
|
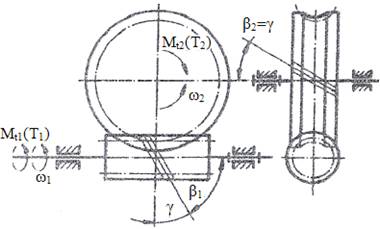
Fig. AEV-A.3.1.1.1 Schema
funcţională a
angrenajului melcat |
Date iniţiale |
|
a.
Turaţia la intrare (melc),
n1 = 1440 rot/min. b. Raportul de angrenare, u=40; turaţia la ieşire (roata melcată), n2 = n1/u = 36 rot/min (fer. CEL-C.1) c.
Puterea la ieşire
(roata melcată), P2 = 1,5 kW, şi din fer.
AEV-C.1
rezultă valoarea momentului de torsiune,
d.
Durata de funcţionare, Lh = 10000 ore. e.
Condiţii de funcţionare: maşina motoare – motor asincron; instalaţia antrenată –
transportor reziduuri industriale, temperatura – (-25…50)oC;
caracteristicile mediului – praf şi umezeală ridicată. f.
Condiţii ecologice: utilizarea de materiale şi tehnologii eco, reciclarea materialelor,
protecţia vieţii. |
AEV-A.3.1.2 ALEGEREA MATERIALELOR, TRATAMENTELOR TERMICE
ŞI TEHNOLOGIEI
|
Tab. AEV.A.3.1.2.1 Materialele şi caracteristicile de
rezistenţă specifice solicitărilor angrenajului, melcului
şi roţii melcate (v. subcap.
AEV-P.3.2;
fer.
AEV-M.1) |
||||||
|
Materialul |
Tratamentul
termic |
Fluxul
tehnologic global |
Durităţile
flancurilor |
Duritatea
miezului |
Tensiunea
limită la contact, σHlim [MPa] |
Tensiunea
limită la încovoiere,
σFlim [MPa] |
|
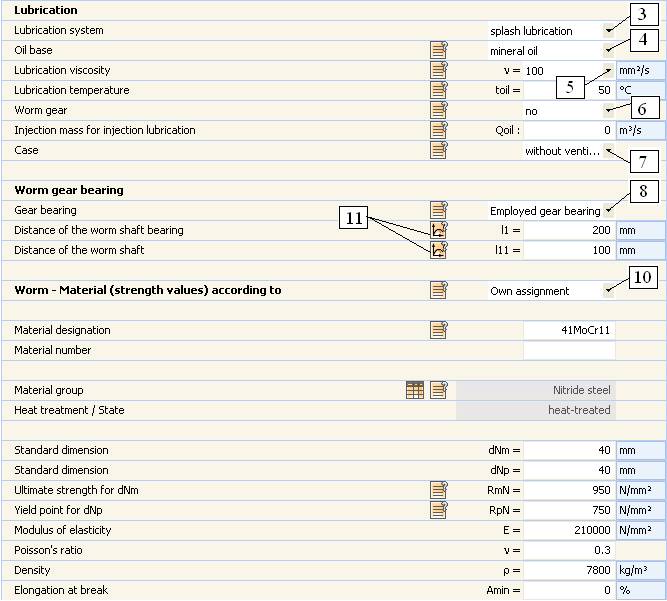
41MoCr11 (melc) |
Îmbunătăţire (călire + revenire
înaltă) |
Îmbunătăţire + prelucrare dantură prin strunjire
+ rectificare dantură
(opţional) |
HB1= 250…300 |
HB1= 250…300 |
700 |
400 |
|
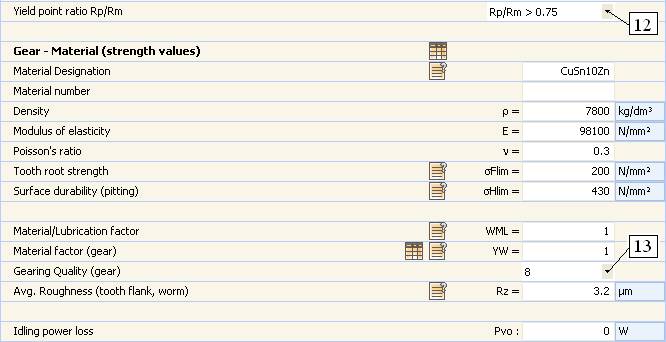
CuSn10Zn (roata melcată) |
- |
Prelucrare dantură prin frezare |
HB2= 75…85 |
HB2= 75…85 |
430 |
200 |
|
Obs.
Alte caracteristici: σr = 950 MPa, σc = 750 MPa, E = 210000 MPa, ν = 0,3 (pentru materialul melcului);
E = 98100 MPa (pentru materialul roţii) |
||||||
AEV-A.3.1.3
PREDIMENSIONARE ŞI PROIECTAREA FORMEI CONSTRUCTIVE
AEV-A.3.1.3.1 Predimensionare (v. subcap. AEV-P.3.3)
Scop: determinarea
preliminară a unei dimensiuni (distanţa dintre axe, modulul axial sau
diametrul roţii melcate), necesară pentru proiectarea formei şi
întocmirea schemei de calcul pentru verificare/dimensionare (etape care nu se
pot derula deoarece unii parametri nu sunt evaluabili la început). Ca parametru
de predimensionare s-a adoptat modulul axial (al melcului), mx.
Tab. AEV.A.3.1.3.1.1 Relaţiile şi parametrii de predimensionare
|
Condiţia
impusă |
Relaţiile
de calcul |
Parametrii
din relaţiile de calcul |
|
|
Rezistenţă la solicitarea de contact |
|
(fer. AEV-C.3.1) |
q = 10 z1 = 1, (v. fer. AEV-A.4.3) z2 = u z1
= 40 KA=1,25
(fer. AEV-F.2); Kv =
1,1; KHβ
=1,1; ZH = 2,5
(fer. AEV-F.7); ZE = 190
MPa (fer. AEV-F.14); NL1=60n1Lh = 8,64 108 cicluri ; NL2=60 n2 Lh =
2,16 107 cicluri (fer. AEV-C.1.5); SHmin=
1,3
(v. fer.
AEV-F.1); ZN = max(ZN1, ZN2) = 1 (fer. AEV-F.13); σHP2 =
σHlim ZN2 /SHmin = 330,8 MPa (fer.
CEL-C.1); |
AEV-A.3.1.3.2 Proiectarea formei constructive
Scop:
Concepţia din considerente
funcţionale, constructive
şi/sau tehnologice a configuraţiilor melcului şi roţii melcate
Tab. AEV-A.3.1.3.2.1 Parametrii şi relaţii de calcul a parametrilor principali ai angrenajului
|
Parametrul din predi- mensionare |
Standardizarea modulului normal şi a distanţei
dintre axe (opţional) |
Adoptarea factorului deplasării
danturii melcului |
Calculul parametrilor geometrici principali
ai angrenajului |
|
|
mx = 4,95 mm |
mx mx = 5 mm
aST = 125 mm |
Distanţa dintre axe este identică
cu valoarea standard, dantură neplasată, x = 0; |
Diametrele de divizare ale melcului şi
roţii,
Distanţa dintre axe,
|
(fer. AEV-C.3.3 |
Tab.
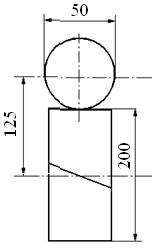
AEV-A.3.1.3.2.1 Schema cinematică. Formele melcului şi roţii melcate
|
Schema
cinematică (fig.
AEV-P.4.3.1) se realizează la scara 1:1 şi oferă o imagine
grafică de ansamblu a viitorului angrenaj. |
|||
|
Calulul
aproximativ al diametrelor arborilor care susţin melcul
şi roata melcată,
|
Calulul
aproximativ al lungimilor butucilor,
|
||
|
Recomandări
de configurare a formelor melcului şi roţii melcate: Melcul are dimensiune radială mică (fig. AEV.P.4.3.2,a) cvasiegală cu
dimensiunile arborelui, dA <
0,8 d1 = 40 mm şi se execută corp comun cu arborele. Roata
melcată are dimensiune
radială mare cu coroană melcată montată prin
asamblare prin strângere, disc şi butuc (fig. AEV-P.1.3.2, a ,d, e). |
|||
|
|
|
|
|
|
a |
b |
||
|
Fig.
AEV-A.3.1.3.2.1 Schema
cinematică a angrenajului melcat |
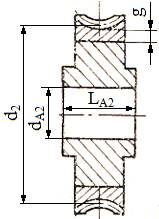
Fig. AEV-A.3.1.3.2 Formele
roţilor angrenajului melcat: a
– melcul corp comun cu arborele; b – coroană melcată
montată prin asamblare cu
strângere |
||
|
Obs.
Mt1= Mt2/u/η
= 13263 Nmm (η=0,75) |
|||



AEV-A.3.1.4
DIMENSIONARE ŞI VERIFICARE
Tab.
AEV-A.3.1.4.1 Calculul
parametrilor geometrici şi a factorilor de corecţie
|
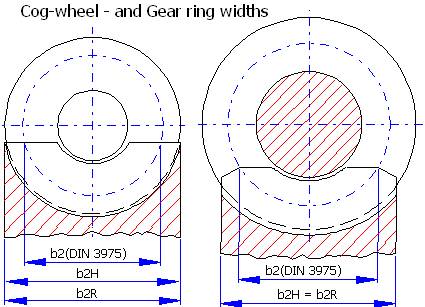
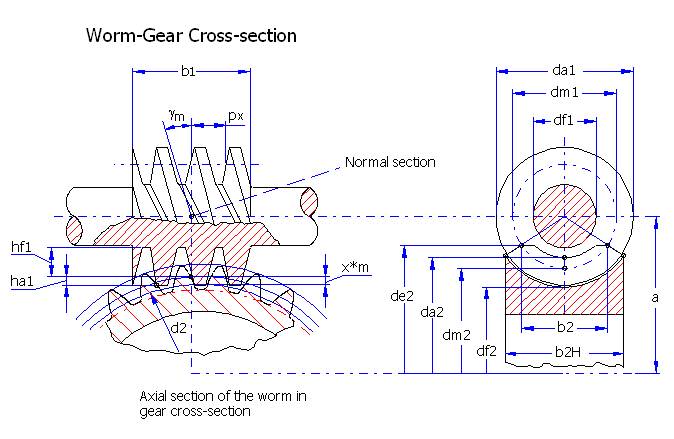
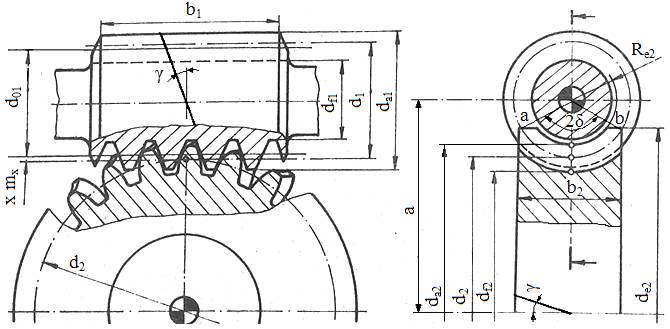
Fig. AEV-P.3.1.4.1 Parametri geometrici principali ai angrenajului melcat şi ai roţilor |
Succesiunea etapelor |
|
a.
Stabilirea şi calculul principalelor
elemente geometrice conform relaţiilor din
fer.
AEV-C.3.5
(fer.
AEV-T.2.1); calculul geometric se poate face şi cu pachetul performant MDESIGN
(v. subcap. AEV-A.3.1.6). b.
Determinarea vitezei periferice (a melcului în polul angrenării), c. Adoptarea treptei de precizie, procedeelor de prelucrare şi rugozităţilor treapta de precizie 8, frezare, rugozităţile flancurilor active, Ra = 3,2 μm fer. AEV-P.1.6; fer. AEV-F.11). d.
Adoptarea vâscozităţii şi
tipului lubrifiantului TIN
300 EP (fer. AEV-F.12). e.
Determinarea factorilor de corecţie dependenţi de dimensiunile
angrenajelor real şi virtual: Kv = 1,15; KHβ = KFβ
=1; Yβ = 1-γ/120 = 1
(fer.
CEL-C.1); ZR = 1, YR2 =1 (fer.
AEV-F.11); ZH=1,9 , YFa2 =2,5
(fer.
AEV-F.7); Zv 0,95 (fer.
AEV-F.10); ZL = 1 |
Tab. AEV-A.3.1.4.2 Calcule de verificare şi/sau dimensionare
|
Calculul
parametrilor de verificare/redimensionare |
|
|
Tensiunea efectivă maximă de contact |
Tensiunile efective maxime de încovoiere |
|
|
|
|
Factorul de siguranţă la solicitarea de contact |
Factorii de siguranţă la solicitarea de
încovoiere |
|
|
|
|
Verificare |
|
|
SH ≥ SHmin (1,33 > 1,3), SF2 > SFmin (20 >> 1,5), pentru SHmin şi SFmin (v. fer. AEV-F.1) |
Inegalitatea
corespunzătoare solicitării de contact este respectată cu
abatere redusă şi angrenajul nefiind supradimensionat major nu se
impune dimensionare. |
Tab. AEV-A.3.1.4.3 Calculul forţelor din angrenaj
|
Relaţiile
de calcul a forţelor
(fer.
AEV-C.3.7, v.
subcap.
AEV-T.2.4.2) |
Obs. |
||
|
Ft,a
[N] |
Fr
[N] |
Fn
[N] |
|
|
|
|
|
Pentru,
μ = 0,035,
|
AEV-A.3.1.5
PROIECTAREA FORMEI TEHNOLOGICE. DESENE DE EXECUŢIE
Configurarea
roţilor dinţate se face având la bază principiile
proiectării elementelor mecanice precum şi recomandările din fer
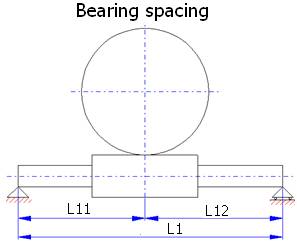
AEV-P.1. Lungime butucului se determină în funcţie de lungimea
asamblării arbore-butuc (pentru pană paralelă, v. fer. AEV-CX.2).
|
|
|
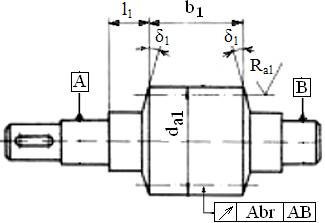
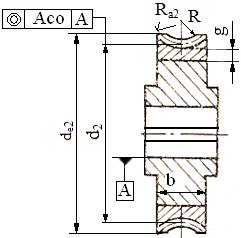
Specificaţii pentru execuţie înscrise
pe desen: a.
Cote dimensionale: diametrul cercului de cap, da1;
diametrul cercului de picior, df
(opţional); lăţimea danturii, b; diametru
exterior de2; diametrul de divizare d2; b. Simboluri
de evidenţiere a abaterilor de formă: cilindricitate a
suprafeţei de divizare c.
Simboluri
de abateri de poziţie: bătaie radială
(concentricitate) a danturii (suprafaţa cilindrului de divizare) în
raport cu suprafaţa (suprafeţele) de rezemare de rotaţie
simbolizate şi marcate cu A sau cu A şi B; d. Simboluri
de calitatea suprafeţei: danturii şi suprafeţelor de
rezemare cilindrice şi frontale. Specificaţii pentru execuţie înscrise tabelar
pe desen sau ataşate: modulul axial; numărul de începuturi, z1;
tipul melcului; unghiul de înclinare, β; factorul diametral;
direcţia înclinării dinţilor (dreapta sau stânga); melcul de
referinţă; factorul deplasării danturii, x; treapta de
precizie şi jocul conform; distanţa dintre axe; grosimea dintelui;
înălţimea capului dintelui. |
|
a |
b |
|
|
Fig. AEC-A.4.5.1 Specificaţii
înscrise pe desenele de execuţie:
a - melc comun cu arborele;
b – roată melcată |
||
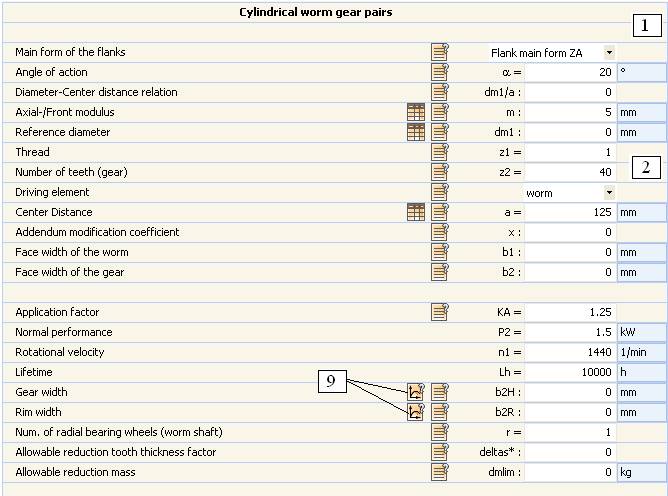
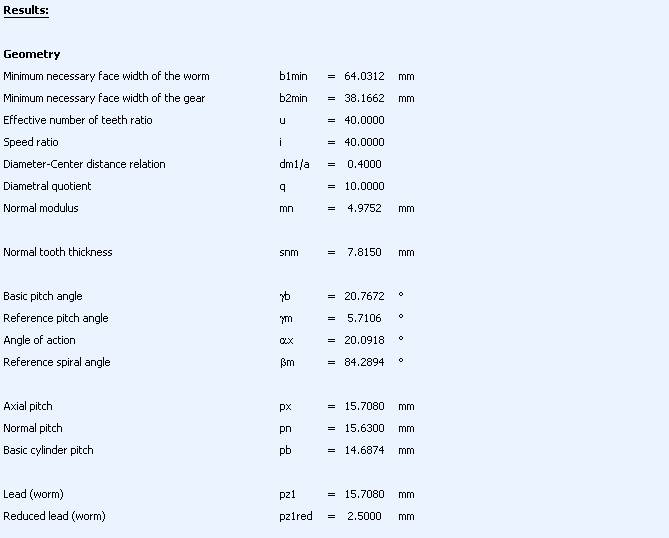
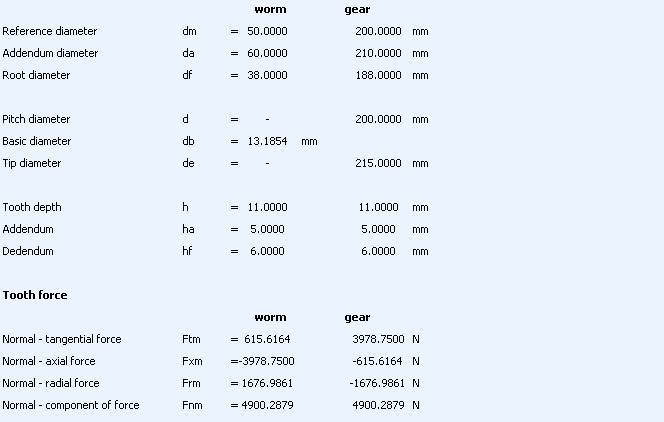
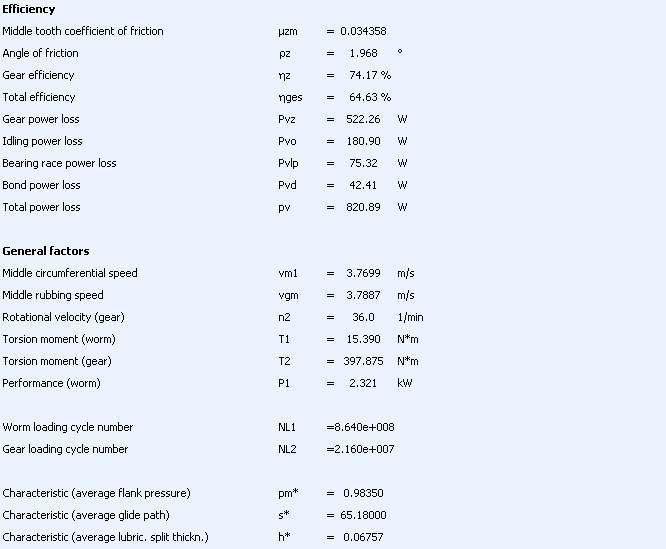
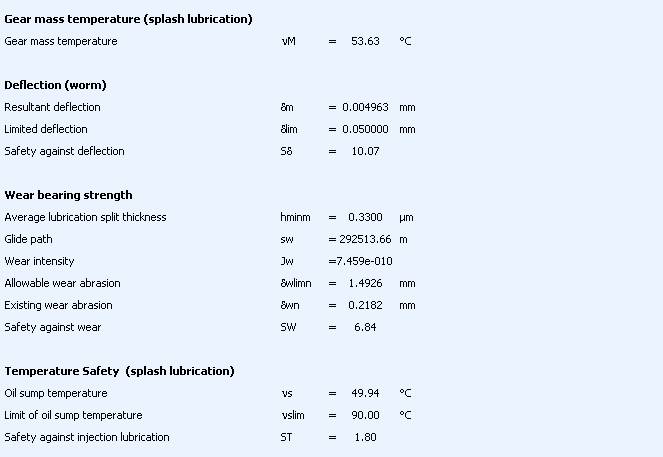
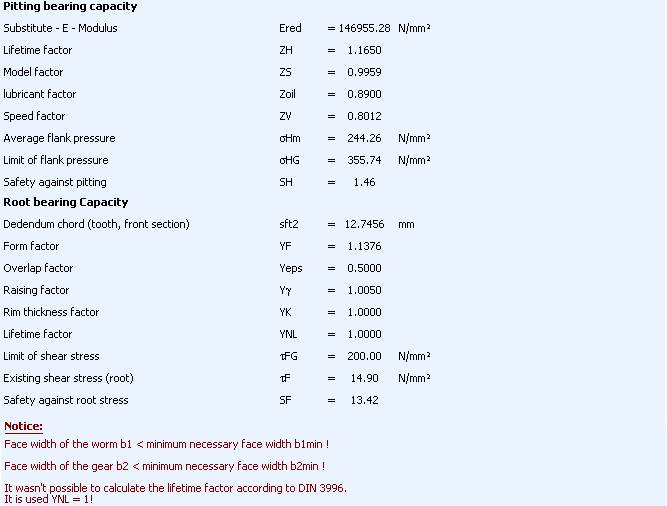
AEV-A.3.1.6 VERIFICAREA MODELULUI CU PACHETUL PERFORMANT MDESIGN
|
Preprocesarea modelului de
calcul |
|||||||||||
|
|
|||||||||||
|
Introducerea datelor şi selectarea
opţiunilor de calcul |
|||||||||||
|
|
|
||||||||||
|
Rezolvarea modelului |
|||||||||||
|
Se activează butonul, |
|
® |
Corectare neconcordanţe sau erori în
datele de intrare (numai dacă apar ferestre de avertizare) |
® |
|
® |
|
® |
|
Se salvează modelul în fişierul AEV-MD.3 |
|
|
Postprocesarea
rezultatelor |
|||||||||||
|
|
|
||||||||||
|
Obs. În cazul calculului cu MDESIGN a rezultat factorul de
siguranţă SH = 1,46 mai mare decât cel obţinut prin calculul clasic (1,33) aspect
ce se justifică prin valori diferite ale factorilor de corecţie
consecinţă a utilizării de standarde diferite. |
|||||||||||