|
Alegerea
prehensorului
Calculul valorilor parametrilor de
manipulare conform Subcap.3.1.2
Alegerea tipul prehensorului (tab.2)
Tab. 2 Dispozitive de prehensiune cu bacuri paralele, de catalog
https://schunk.com/dk/en/gripping-systems/centric-grippers/c/PUB_8301
|
Tip prehensor
|
Descriere
|
|

EGP
|
Structura constructivă: bacuri autocentrante acţionate electric; ghidaje cu rostogolire;
control I/O digital.
Performanțe: deschidere bacuri 3...10 mm, greutate maximă a piesei de
manipulat/prelucrat 0,07-1,25 Kg; forță de prindere (12-300 N)
reglabilă manual, cu un întrerupător rotativ integrat; ghidare a bacurilor
fără rotiri.
Utilizare: pentru prinderea și manipularea pieselor mici și mijlocii
cu forță variabilă și viteze mari; pentru procese de asamblare,
testare, în laboratoare și industrie.
|
|

MGP-plus
|
Structura constructivă: bacuri autocentrante acţionate pneumatic; ghidaje cu rostogolire.
Performanțe: deschidere
bacuri 1.5 ...10 mm; greutate maximă a piesei de manipulat/prelucrat
0,14...1,25 Kg; forțe maxime de prindere asigurate de acţionarea
pistonului oval; forță minimă de prindere și în cazul unei
scăderi a presiunii; presiune variabilă pentru toate sistemele
automatizate; strângere precisă, asigurată de ghidajul cu role transversale
şi datorată unei orientări corespunzătoare a bacurilor; frecare redusă;
adaptare de clești universali și flexibili; montare frontală a
dispozitivului de prindere.
Utilizare: pentru prinderea și manipularea pieselor mici și mijlocii
cu forță variabilă și viteză mare în medii curate, pentru
asamblare, testare, în laboratoare și industrie.
|
|

EGS
|
Structura constructivă:
modul de pivotare electric, cu 2 degete; ghidaje cu role în cruce; unitate
rotativă și dispozitiv de prindere îmbinate într-un singur modul
compact; control electronic; I/O digital.
Performanțe: deschidere
maximă a bacurilor 3...6 mm, masa maximă admisă a sarcinii 0,15...0,55 Kg;
integrare rapidă în sistemele existente; permite 4 input-uri digitale;
apucare precisă, fără pretensionare, cu forțe de prindere aproape
constante pe toată lungimea degetelor; reglare forţă de prindere (30...140
N); reglare independentă a forţei de prindere şi unghiului de rotaţie
(30°...270°); flexibilitate ridicată în timpul ciclului asigurată de viteza de rotație reglabilă.
Utilizare: pentru prinderea și deplasarea pieselor mici, sensibile.
|
|

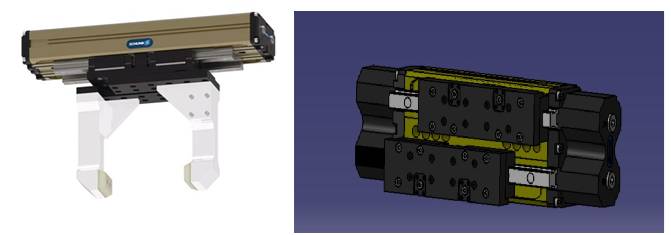
LEG
|
Structura constructivă: dispozitiv de prindere cu 2 bacuri paralele cu lungime mare; ghidaj
cu șină dublu profilat; servomotor adaptabil și controler extern.
Performanțe: deschidere maximă a bacurilor 101...281 mm; masă maximă a sarcinii
de manipulat între 5,25-7,5 kg; forța de prindere cuprinsă între
1,050...1,500 N; integrare ușoară în sistemul de comandă asigurată de
posibilitatea de a atașa un servomotor comun (Bosch sau Siemens); mișcarea
sincronă, dar și asincronă a degetelor.
Utilizare: pentru manevrare flexibilă și dinamică a diverselor componente
în industria construcțiilor de mașini și instalații
pentruasamblare și manipulare în
industria automobilelor.
|
|
 MEG MEG
|
Structura constructivă: dispozitiv de prindere cu 2 bacuri paralele; ghidaj cu role
transversale, cu motor integrat; control electronic prin intrări digitale și
analogice: forța, poziția și viteza parametrilor de
prindere, precum și diferitele moduri de funcționare sunt
predefinite. Starea dispozitivului de prindere poate fi monitorizată prin
ieșiri digitale și analogice.
Performanțe: deschidere maximă a
bacurilor 6..10 mm; greutate maximă a piesei de manipulat/prelucrat între
0,2...0,7 Kg; forță de prindere cuprinsă între 40...140 N; manipulare
intensivă cu capacitate de pre-poziționare; funcționare silențioasă,
cu randament ridicat; permite asamblarea de clești universali,
flexibili.
Utilizare: pentru prinderea și deplasarea pieselor de dimensiuni mici
până la cele medii cu forță variabilă.
|
|

Co-act
EGP-C
|
Structura constructivă:
dispozitiv de prindere cu 2 bacuri paralele, închis cu capac de protecție
împotriva coliziunii; control electronic; I/O digital.
Performanțe: forță de prindere reglabilă cu ajutorul unui comutator rotativ
în patru trepte; forță de prindere ce nu depășește o valoare
definită datorită posibilității de limitare a curentului;
monitorizarea poziției printr-un sistem de senzori integrat;
minimizare a riscului de accidente în timpul utilizării în operații de
colaborare.
Utilizare: pentru o gamă largă de aplicații - de la asamblarea
componentelor mici în industria electronică până la aplicațiile de
asamblare din sectorul auto; potrivit pentru aplicații mobile,
datorită unei tensiuni de lucru de 24VDC (Volts, Direct Current).
|
Alte
tipuri de prehensoare profesionale
https://schunk.com/dk/en/gripping-systems/centric-grippers/c/PUB_8301
https://selltech.com.pl/admin/Editor/assets/shunk/systemy_elektryczne/34_MEG_40-64_GB.pdf
https://www.ramcoi.com/schunk/pneumatic-grippers
https://www.directindustry.com/prod/schunk-gmbh-co-kg/product-7038-1841213.html





Prehensorul ales:

Caracteristicile prehensorului ales:

|