TRD-T.
CONSTRUCŢIA ŞI MODELAREA TRANSMISIILOR CU ROŢI DINŢATE
|
CUPRINS |
|
TRD-T.1 DEFINIŢII TRD-T.2
STRUCTURA CONSTRUCTIVĂ
TRD-T.3 DOMENII DE UTILIZARE, AVANTAJE ŞI DEZAVANTAJE TRD-T.4 CLASIFICARE TRD-T.5 MATERIALE ŞI
TEHNOLOGII
TRD-T.5.1
Materiale şi tratamente termice
TRD-T.5.2
Tehnologii de prelucrare TRD-T.6 FORME ŞI CAUZE DE
SCOATERE DIN UZ SAU DE COMPORTARE NECORESPUNZĂTORE TRD-T.7 PARAMETRI
FUNCŢIONALI ŞI CONSTRUCTIVI TRD-T.8 MODELE STRUCTURALE FUNCŢIONALE ŞI CONSTRUCTIVE TRD-T.8.1 REDUCTOARE DE TURAŢIE |
TRD-T.1 DEFINIRE
Transmisia
mecanică cu roţi dinţate este subsistemul care are funcţia de a
transmite şi transformă energia mecanică (de rotaţie sau de
translaţie) de la un sistem de antrenare (motor) la maşina (sistemul) antrenat (rezistent)
prin angrenaje (v. AEV-T.1).
Maşina este sistemul tehnic ale cărui părţi componente
au mişcări determinate în scopul producerii de lucru mecanic util
(maşină de lucru) sau al transformării unei forme de energie în
altă formă de energie (maşină de forţă, motoare);
maşinile de lucru pot fi: maşini tehnologice (maşini
unelte, maşini textile etc.), maşini de transport (macara, automobil etc.)
Maşinile motoare sunt maşini de forţă care transformă care transformă o formă de energie alta decât mecanică (termică, electrică, hidraulică, pneumatică) în energie mecanică; motoarele electrice transformă energia electrică în energie mecanică, motoarele termice transformă energia termică în energie mecanică.
Sistemul antrenat (rezistent) este partea care trebuie să realizeze sarcina
propusă şi poate fi: utilaj tehnologic, maşină de lucru, maşină
de transport etc.
Reductoare de
turaţie de uz general sunt
transmisii cu roţi dinţate care au scopul reducerii turaţiei concomitent cu mărirea (amplificarea)
momentului de torsiune; se folosesc ca unităţi independente în
diverse transmisii permiţând, utilizarea de motoare de acţionare de
turaţii mari şi gabarite reduse pentru procese/sisteme de lucru
antrenate cu viteze reduse; se realizează într-o gamă largă de
tipodimensiuni în întreprinderi specializate cu eficienţă
economică ridicată.
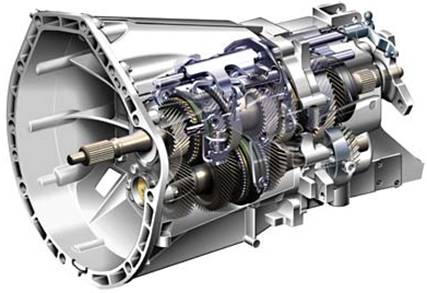
Cutiile de viteze sunt transmisii mecanice cu roţi dinţate cu
raport de transmitere variabil discret
TRD-T.2
STRUCTURA CONSTRUCTIVĂ
|
|
|
|
|
a |
b |
c |
|
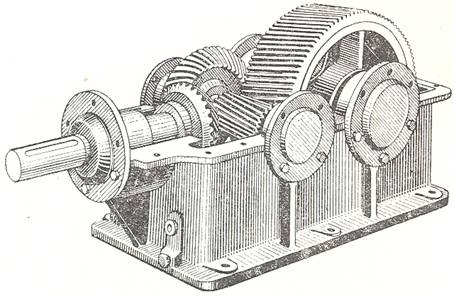
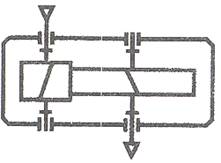
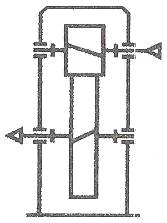
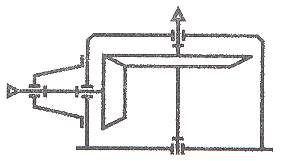
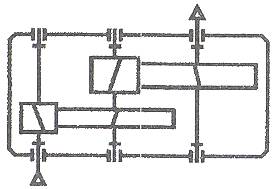
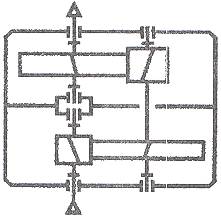
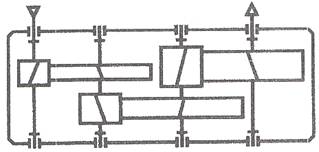
Fig. TRD-T.2.1 Structura constructivă generală a transmisiilor cu
roţi dinţate: a – reductor
de turaţie [Crudu, 1981]; b
– cutie de viteze [http://cutiideviteza.ro]; c – reductor central şi diferenţial[http://cutiideviteza.ro] |
||

TRD-T.3 DOMENII DE UTILIZARE, AVANTAJE ŞI
DEZAVANTAJE
Necesitatea
utilizării transmisiilor [Dobre,
2005]:
- deseori vitezele necesare funcţionării maşinilor antrenate (de lucru, de transport) sunt diferite de cele nominale ale motoarelor;
-
sarcinile la
maşini antrenate sunt superioare celor de la arborele motoarelor;
-
viteza maşininilor sau vehiculelor trebuie să fie
variabilă (reglabilă), inversabilă şi chiar cu opriri
-
necesitatea
antrenării cu un motor a mai multor maşini (sisteme) antrenate cu
viteze diferite
-
transformarea
mişcării de rotaţie a motoarelor de antrenare în
mişcări de translaţie ale maşinilor (sistemelor) antrenate
-
imposibilitatea
legării directe între arborele motorului şi cel al maşinii
antrenate
Domenii
principale de utilizare: cutii de
viteze, reductoare de turaţie, multiplicatoare de turaţie, transmisii
diferenţiale, transportoare, ascensoare, utilaje tehnologice,
instalaţii petroliere etc.
Tab.
TRD-T.3.1 Avantajele şi dezavantajele transmisiilor cu roţi
dinţate [Moldovean,
2001]
|
Avantaje* |
Dezavantaje* |
|
-
asigură
raport de transmitere constant -
au durabilitate
şi siguranţă mare în funcţionare -
au capacitate
mare de transmitere a momentului de torsiune; -
au randamentul
ridicat -
necesită
întreţinere uşoară în exploatare |
- necesită precizie ridicată de execuţie şi montaj; -
tarnsmit şocurile
şi vibraţiile -
zgomote şi
vibraţii în exploatare |
|
* Raportate la alte tipuri de transmisii (prin
elemente flexibile, prin fricţiune etc.) |
|
TRD-T.4 CLASIFICARE
Tab.
TRD-T.4.1 Clasificarea transmisiilor mecanice
|
Criteriul |
Tipul |
Exemple |
|
Natura elementelor active |
Cu corpuri rigide |
Transmisii cu roţi
dinţate; transmisii cu roţi de fricţiune; |
|
Cu corpuri flexibile |
Transmisii prin
curele |
|
|
Modul de transmitere a
puterii |
Prin formă (angrenare) |
Transmisii cu roţi
dinţate; Transmisii prin curele dinţate(sincrone); Transmisii prin
lanţ; |
|
Prin frecare |
Transmisii cu roţi de
fricţiune; Transmisii prin
curele trapezoidale |
|
|
Constanţa raportului
de transmitere |
Cu raport de transmitere
constant |
Transmisii reductoare (i > 1); transmisii multiplicatoare (i < 1); |
|
Cu raport de transmitere
variabil |
Cutii de viteze (schimbarea
vitezei în trepte); variatoare prin fricţiune (schimbarea vitezei
continuu) |
Tab. TRD-T.4.2 Clasificarea transmisiilor mecanice cu roţi dinţate
|
Criteriul |
Tipul |
Exemple |
|
Poziţia planului care
conţine axele roţilor angrenajelor |
În plan orizontal |
Fig. TRD-T.2.1,a,e,f,g,h; fig. TRD-T.4.2,b |
|
În plan vertical |
Fig. TRD-T.4.2,i,j,k,l | |
|
În plan înclinat |
||
|
În mai multe plane |
||
|
Modificarea vitezei |
Reductoare |
Fig. TRD-T.2.1; fig. TRD-T.4.2 |
|
Multiplicatoare |
||
|
Tipul angrenajelor
componente (v . AEV-T.4) |
Cilindrice |
Fig. TRD-T.2.1,a,b,e...l; fig. TRD-T.4.2,a |
|
Conice |
Fig. TRD-T.2.1,m,n,s,u; fig. TRD-T.4.2,b | |
|
Hiperboloidale: elicoidale, melcate, hipoide |
Fig. TRD-T.2.1,d,o,p; fig. TRD-T.4.2,c,g | |
|
Combinate |
Fig. TRD-T.2.1,c,d,m,n,p,s,u; fig. TRD-T.4.2,b | |
|
Numărul angrenajelor
înseriate |
Cu o treaptă |
Fig. TRD-T.2.1,c,d,m,n,p,s,u; fig. TRD-T.4.2,b |
|
Cu două trepte |
Fig. TRD-T.2.1,e...p; fig. TRD-T.4.2,a,b,d,e | |
|
Cu mai multe trepte |
Fig. TRD-T.2.1,r,s |
|
|
Poziţia axelor
roţilor în timpul funcţionării |
Cu axe fixe |
Fig. TRD-T.2.1,a...s; fig. TRD-T.4.2,a...e,g |
|
Cu axe mobile (planetare) |
Fig. TRD-T.2.1,z,u; fig. TRD-T.4.2,f | |
|
Numărul de ieşiri |
Cu o ieşire |
Fig. TRD-T.2.1,a,b |
|
Cu o două sau
mai multe ieşiri |
Fig. TRD-T.2.1,c |
Tab. TRD-T.4.3 Clasificarea reductoarlor de turaţie de uz general (v. fer. TRD-S.1)
|
Criteriul |
Tipul |
Schema |
|
Numărul angrenajelor
înseriate |
Cu o treaptă |
Fig. TRD-T.4.1,a,b,c,d,u; fig.
TRD-T.4.2,a,c,f |
|
Cu două trepte |
Fig. TRD-T.4.1,e…p; fig.
TRD-T.4.2,b,d,e |
|
|
Cu trei trepte |
Fig. TRD-T.4.1,r,s |
|
|
Tipul angrenajelor
componente |
Cilindrice |
Fig. TRD-T.4.1,a,b,e…l,r,t;
fig. TRD-T.4.2,a,d,e,f |
|
Conice |
Fig. TRD-T.4.1,c,m,s,u;
fig. TRD-T.4.2,b |
|
|
Melcate |
Fig. TRD-T.4.1,d,o,p; fig.
TRD-T.4.2,c |
|
|
Conico-cilindrice |
Fig. TRD-T.4.1,m,n,s; fig.
TRD-T.4.2,b |
|
|
Cilindo-melcate |
Fig. TRD-T.4.1,p |
|
|
Melcato-cilindrice |
Fig. TRD-T.4.1,o |
|
|
Poziţia planului care
conţine axele arborilor |
Orizontal |
Fig. TRD-T.4.1,a,e,f,g,h;
fig. TRD-T.4.2,a,b,d,e |
|
Vertical |
Fig. TRD-T.4.1,b,c,i,j,k,l;
|
|
|
Înclinat |
||
|
Poziţile axelor de intrare/ieşire |
Coaxial (arborele de
intrare şi de ieşire au aceeaşi axă) |
Fig. TRD-T.4.1,f,j,e; fig.
TRD-T.4.2,e |
|
Cu intrare orizontală
(arborele de intrare are axa în plan orizontal) |
Fig.
TRD-T.4.1,a,b,c…m,o,p,r,s; fig. TRD-T.4.2,a,b,d,e,f |
|
|
Cu intrare
verticală (arborele de intrare
are axa în plan vertical) |
Fig. TRD-T.4.1,n; |
|
|
Cu ieşire
orizontală (arborele de ieşire are axa în plan orizontal) |
Fig. TRD-T.4.1,a…s; fig.
TRD-T.4.2,a…f |
|
|
Cu ieşire
verticală (arborele de ieşire are axa în plan vertical) |
Fig. TRD-T.4.1,c; |
|
|
Poziţia axelor
roţilor în timpul funcţionării |
Cu axe fixe |
Fig. TRD-T.4.1,a…s; fig.
TRD-T.4.2,a…e |
|
Cu axe mobile (planetare) |
Fig. TRD-T.4.1,t,u; fig.
TRD-T.4.2,f |
|
|
Transmiterea momentului
de torsiune în paralel |
Bifurcat în
treapta I - a |
Fig. TRD-T.4.1,g,k |
|
Bifurcat în
treapta a II - a |
Fig. TRD-T.4.1,h,l |
|
|
Bifurcat în
treapta I -a şi a II
- a |
||
|
Existenţa motorului
de antrenare |
Reductor fără
motor |
Fig. TRD-T.4.2,a…e |
|
Motoreductor |
Fig. TRD-T.4.2,f |
|
|
Tipul arborelui
de ieşire |
Cu un cap |
Fig. TRD-T.4.2,a…e |
|
Cu două capete |
|
|
|
Plin |
Fig. TRD-T.4.2,b,d,e |
|
|
Tubular |
Fig. TRD-T.4.2,a,c |
|
|
|
|
|
|
a |
b |
c |
d |
|
|
|
|
|
|
e |
f |
g |
h |
|
|
|
|
|
|
i |
j |
k |
l |
|
|
|
|
|
|
m |
n |
o |
p |
|
|
|
|
|
|
r |
s |
t |
u |
|
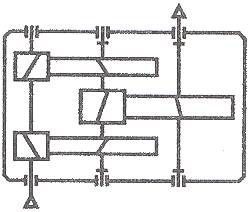
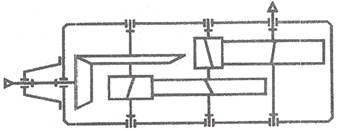
Fig. TRD-T.4.1 Reductoare de turaţie cu roţi dinţate (scheme
funcţionale): a – cilindric
orizontal; b – cilindric vertical;
c – conic vertical; d – melcat cu intrare pe
jos; e – cilindric cu două trepte orizontal; f – cilindric cu două trepte orizontal
coaxial; g – cilindric cu două trepte orizontal
bifurcat în treapta I - a; h – cilindric cu două trepte orizontal
bifurcat în treapta a II - a; i – cilindric cu două trepte vertical c
intrare pe sus; j – cilindric cu două trepte vertical
coaxial cu intrare pe sus; k – cilindric cu două trepte vertical
bifurcat în treapta I – a cu intrare pe sus; l – cilindric cu
două trepte vertical bifurcat în treapta a II – a cu intrare pe sus; m – conico-cilindric (cu două trepte)
orizontal; n – conico-cilindric (cu două trepte)
orizontal cu intrare verticală; o
– conico-melcat (cu două
trepte); p – melcato-cilindric (cu două trepte); r – cilindric cu trei trepte orizontal; s – conico-cilindric cu trei trepte
orizontal; t – cilindric planetar; u –
conic diferenţial |
|||




|
|
|
|
|
a |
b |
c |
|
|
|
|
|
d |
e |
f |
|
[http://www.neptun-gears.ro] |
http://www.componenteindustriale.ro/ro |
http://www.gearsystem.net/ |
|
g |
||
|
Fig. TRD-T.4.2 Reductoare de turaţie cu roţi dinţate (vederi
generale): a – cilindric cu
arborele ieşire tubular; b –
conic orizontal; c – motoreductor melcat cu arborele ieşire tubular; d – cilindric orizontal în două
trepte; e – cilindric coaxial
orizontal în două trepte; f –
cilindric planetar [http://www.reductoare-rossi.ro]; g – melcate; |
||









TRD-T.5 MATERIALE ŞI TEHNOLOGII
TRD-T.5.1 Materiale şi tratamente
termice
TRD-T.5.2 Tehnologii de prelucrare şi asamblare
TRD-T.6 FORME ŞI CAUZE DE SCOATERE DIN UZ SAU DE
COMPORTARE NECORESPUNZĂTORE
Tab.
TRD-T.6.1 Forme şi cauze de scoatere din uz sau de
comportare necorespunzătoare a transmisiilor cu roţi dinşate [Jula, 1989; Moldovean, 2001; Danape, 2012]
|
Tipul
cedării |
Forme |
Apariţie |
Cauze |
Manifestare |
Evitare |
|
Scoaterea din uz a angrenajelor |
Ruperea
la suprasarcini |
La roţile din oţeluri
cu duritate mărită |
Suprasarcini şi şocuri
care apar în condiţii de funcţionare neobişnuite |
Ruperea la baza dintelui, la
roţile cu dantură dreaptă; ruperea colţului dintelui la
roţile cu dantură înclinată |
Limitarea momentului transmis prin introducerea de
cuplaje de siguranţă Mărirea preciziei de
execuţie a roţilor dinţate şi/sau a
rigidităţilor arborilor |
|
Ruperea
la oboseală |
La
roţile din oţeluri cu duritatea mai mare de 45 HRC sau din fonte |
Depăşirea
rezistenţei la oboseală a materialului la solicitarea de
încovoiere variabilă în timp |
Iniţial, microfisuri
în zona de racordare întinsă, care se dezvoltă provocând ruperea
dinţilor |
Limitarea prin calcul a tensiunilor maxime de încovoiere
de la baza dintelui la valori admisibile de oboseală Realizarea unor raze mari de racordare.
Mărirea
secţiunii dintelui la bază prin creşterea modulului
şi/sau prin deplasări pozitive de profil |
|
|
Deformarea plastică |
La
roţile din oţeluri cu duritate redusă |
Încărcări
cu suprasarcini
şi şocuri |
Depăşirea
rezistenţei la curgere a materialului |
Limitarea momentului transmis
prin introducerea de cuplaje de siguranţă |
|
|
Scoaterea din uz a
rulmenţilor |
Griparea |
Rulmenţii
puternic încărcaţi care funcţionează la temperaturi
ridicate şi ungere insuficientă |
Scăderea
locală a rezistenţei de contact a materialului |
Microsuduri locale între căile de rulare şi corpurile de rostogolire
şi/sau colivie şi corpurile de rostogolire; pierderea preciziei de
rotire, zgomot mare, creşterea rezistenţei la rotire până la
blocare |
Creşterea
eficacităţii sistemului de ungere |
|
Distrugerea
coliviei |
Rulmenţii
care funcţionează la turaţii ridicate încărcaţi cu sarcini
combinate şi/sau montaţi necorespunzător |
Forţe
centrifuge mărite, autovibraţii |
Uzarea
coliviilor în zonele de contact cu corpurile de rostogolire; scăderea
secţiunilor, fisurarea şi ruperea coliviei |
Montare şi exploatare
corespunzătoare |
|
|
Comportare necorespunzătoare (cu
neuniformităţi, vibraţii şi zgomote) datorită angrenajelor |
Deteriorarea
flancurilor prin oboseala de contact (piting, ciupire) |
Cu
precădere, la roţile din oţeluri cu duritate
superficială redusă (sub 45 HRC) |
Oboseala materialului straturilor superficiale ale
flancurilor active determinate de tensiunile de contact variabile în timp |
Microfisuri
iniţiale pe suprafaţa flancurilor active care se măresc
consecinţă a acţiunii presiunii hidrostatice a uleiului generată
în timpul contactelor dinţilor urmate de desprinderea de mici particule
de material rezultând mici ciupituri, fenomenul de pitting
(v. fer. AEV-T.4) Dezvoltarea în timp a
ciupiturilor şi în consecinţă funcţionarea
necorespunzătoare cu vibraţii şi zgomote |
Limitarea prin calcul a tensiunilor maxime de contact (la
oboseală) ale flancurilor active la tensiuni admisibile Tratamente termice şi termochimice care conduc la
mărirea rezistenţei superficiale de contact Deplasări pozitive de profil pentru mărirea
razelor profilelor. Mărirea rugozităţilor flancurilor active
Utilizarea de lubrifianţi aditivaţi. |
|
Deteriorarea
flancurilor prin gripare |
La
roţile angrenajelor puternic încărcate cu viteze mari şi cu
ungeri necorespunzătoare |
Alunecări mărite între
flancuri; rugozităţi mari ale flancurilor |
Zgârieturi orientate de-a lungul
flancului generate de formarea şi ruperea unor microsuduri
datorate sarcinilor locale mari şi a temperaturilor ridicate |
Îmbunătăţirea condiţiilor de ungere
(lubrifianţi aditivaţi); mărirea
preciziei de execuţie şi montaj; micşorarea
rugozităţii flancurilor |
|
|
Deteriorarea
flancurilor prin uzare abrazivă |
La
roţile angrenajelor deschise (neprotejate) şi cu ungeri
necorespunzătoare |
Alunecări mărite între flancuri;
rugozităţi mari ale flancurilor |
Îndepărtarea unor particule fine de material de pe
flancul dintelui ca urmare a unor particule abrazive existente în zona de
contact |
Ungere, etanşări şi protejări
adecvate |
|
|
Deteriorarea
flancurilor prin exfoliere |
La
roţile din oţeluri tratate termic sau termochimic superficial
(călire, cementare, nitrurare) |
Oboseala materialului straturilor
superficiale ale flancurilor active |
Apariţia de microfisuri la
graniţa dintre stratul durificat şi cel de bază |
Tehnologii de tratament termic sau termochimic adecvate |
|
|
Deteriorarea
flancurilor prin curgere plastică |
La
roţile din oţeluri cu duritate redusă |
Încărcări cu suprasarcini,
alunecări mari şi ungere redusă |
Apariţia de adâncituri
pe flancurile dinţilor roţii conducătoare şi adâncituri
pe flancurile dinţilor roţii conduse ca urmare a tensiunilor
tangenţiale mari cauzate de forţele de frecare care îşi
schimbă sensul în polul angrenării |
Reducerea sarcinilor de
contact şi mărirea durităţii flancurilor |
|
|
Comportare
necorespunzătoare (cu neuniformităţi, vibraţii şi
zgomote) datorită angrenajelor |
Deteriorarea
suprafeţelor căilor de rulare şi/sau ale corpurilor de
rostogolire prin oboseala de contact (piting, ciupire) |
Cu
precădere, la rulmenţii rotitori cu turaţia n > 10 rot/min bine lubrifiaţi şi etanşaţi |
Oboseala materialelor straturilor superficiale ale căilor de rulare şi/sau corpurilor de
rostogolire determinate de tensiunile de contact variabile în timp |
Microfisuri iniţiale
pe suprafețele flancurilor active care se măresc
consecinţă a acţiunii presiunii hidrostatice a uleiului
generată în timpul contactelor dinţilor urmate de desprinderea de
mici particule de material rezultând mici ciupituri, fenomenul de pitting; dezvoltarea în timp a ciupiturilor conduce, în
consecinţă, la mărirea jocului şi funcţionarea
necorespunzătoare cu vibraţii şi zgomote |
Limitarea timpului de funcţionare prin calcul de
durabilitate bazat pe capacitatea de încărcare dinamică |
|
Uzarea
abrazivă a căilor de rulare şi/sau a corpurilor de rostogolire |
Rulmenţii
care lucrează în medii cu praf şi impurităţi abrazive
şi etanşaţi necorespunzător |
Depăşirea
limitei de rupere a materialului |
Zgârieturi
pe suprafeţele active; mărirea jocului din rulment şi, deci,
funcţionarea necorespunzătoare cu vibraţii şi zgomote |
Creşterea
eficacităţii sistemelor de etanşare şi ungere |
TRD-T.7 PARMETRI FUNCŢIONALI
ŞI CONSTRUCTIVI
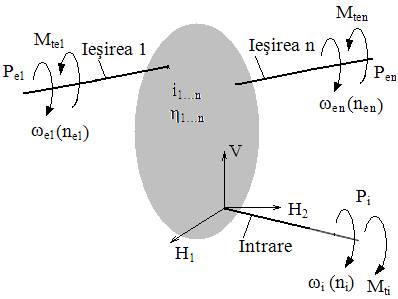
Tab. TRD-T.7.1 Parametri de intrare-ieşire
funcţionali şi constructivi principali
|
Fig. TRD-T.7.1 Schema parametrilor principali de intrare/ieşire intr-o transmisie mecanică |
Semnificaţiile parametrilor: ωi (ni) – vitezele unghiulară (turaţia) de intrare ωe1…n (ne1…n) – vitezele unghiulare (turaţiile) de ieşire; i1…n
– rapoartele de transmitere ale celor n fluxuri de angrenaje ale
transmisiei cu roţi dinţate, i1…n = ωi /ωe1…n =
ni/ne1…n η1…n
– randamentele corespunzătoare celor n fluxuri de angrenaje; Mti – momentul de torsiune la intrare Mte1…n
– momentele de torsiune de ieşire;
Mte1…n = (Mti/ i1…n)
η1…n; Pi
– puterea la intrare; Pe1…n – puterile la ieşire, Pe1…n = (Pi/ i1…n) η1…n |
Tab. TRD-T.7.2 Particularităţi funcţionale şi
constructive şi caracteristici principale ale reductoarelor
|
Tipul reductorului |
Particularităţi funcţionale şi
constructive şi caracteristici principale |
Soluţia constructivă |
|
Reductore cilindrice într-o treaptă |
La viteze şi momente de
torsiune reduse se utilizează dantură dreaptă; raportul de
transmitere maxim, imax = 8, la viteze şi momente de torsiune mari se
utilizează dantură înclinată, imax = 10; la sarcini transmise foarte mari se preferă
dantură în V |
fer.
TRD-S.1 |
|
Reductore conice într-o treaptă |
Modifică direcţia de transmitere a sarcinii; raportul de transmitere maxim, imax = 5, pentru dantură dreaptă; imax = 6, pentru dantură curbă; viteza periferică maximă, vmax = 2…3 m/s, pentru dantură dreaptă; vmax = 35…40 m/s, pentru dantură curbă |
|
|
Reductore melcate într-o treaptă |
Recomandate pentru puteri
mici şi medii; raportul de transmitere maxim, imax = 80; randamentul η = 0,9…0,45 (valorile mici
pentru rapoarte de transmitere mari); viteza periferică a melcului, vmax
= 20 m/s |
|
|
Reductoare cilindrice în două trepte |
De regulă, reductoarele cilindrice cu două trepte sunt cu angrenaje cu dantură înclinată; raportul de transmitere maxim, imax = 50; reductoarele cilindrice obişnuite au arbori rigizi pentru montarea roţilor deoarece acestea sunt dispuse asimetric faţă de reazeme; reductoarele cilindrice bifurcate, folosite pentru sarcini mari şi foarte mari, asigură simetrizarea schemei de transmitere a sarcinii (treptele bifurcate se execută cu dantură înclinată în sens invers; reductoarele cilindrice coaxiale asigură încărcarea simetrică a arborilor şi reducerea gabaritului reductorului |
|
|
Reductoare melcate în două trepte |
Realizează rapoarte de
transmitere foarte mari, imax = 2500; randamente scăzute; necesită
precizii de prelucrare şi mantaj ridicate |
|
|
Reductoare conico-cilindrice |
Modifică direcţia
de transmitere a sarcinii; realizează rapoarte de transmitere maxime, imax
= 45; treapta conică se
foloseşte totdeauna ca treaptă rapidă (cu viteza maximă) |
|
|
Reductoare cilindro-melcate sau melcato-cilindrice |
Realizează rapoarte de transmitere mari, imax = 250 |
|
|
Reductoare cilindrice în trei trepte |
Rapoart de transmitere
maxim, imax =
250; pentru uniformizarea încărcării elementelor se pot realiza în
structuri bifurcate; în cazul în care se impune
modificarea direcţiei de transmitere a mişcării se
realizeză cu prima treaptă conică dar imax = 200 |
|
|
Reductoare planetare |
Reductoare planetare cu o treaptă cu satelit şi coroană dinţată la interior fixă, imax = 10, randamentul η = 0,94…0,96; reductoare planetare cu două treapte cu satelit şi coroană dinţată la interior fixă, imax = 100, randamentul η = 0,90…0,95 |
Împărţirea
raportului de transmitere pe treptele reductorului
Criterii de optimizare a rapoartelor de transmitere pe trepte:
- egalizarea portanţei angrenajelor la presiunea de contact sau de încovoiere pe toate treptele;
- realizarea unui gabarit şi greutăţi minime a reductorului;
-
egalizarea
pătrunderii în baia de ulei a roţilor dinţate mari
TRD-T.8
MODELE STRUCTURALE FUNCŢIONALE ŞI CONSTRUCTIVE
TRD-T.8.1 REDUCTOARE DE TURAŢIE
TRD-T.8.1.1 Model structural-funcţional general al reductoarelor cu angrenaje
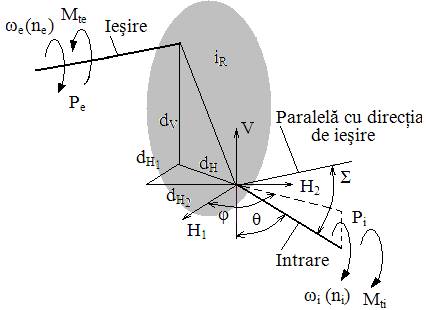
Tab. TRD-T.8.1.1.1 Parametri de intrare-ieşire
funcţionali şi constructivi principali
|
Fig. TRD-T.7.1 Schema parametrilor principali de intrare/ieşire intr-o transmisie mecanică |
Semnificaţiile parametrilor: H1H2V – sistem de coordonate spaţial ortogonal cu axele H1 şi H2 în plan orizontal şi V în plan vertical; dV – distanţa dintre punctele de intrare şi de ieşire în plan vertical; dH – distanţa dintre punctele de intrare şi de ieşire în
plan orizontal cu componentele dH1 şi dH2 componentele
după axele H1 şi, respectiv, H2 ( θ – unghiul direcţiei punctelor de intrare şi de ieşire faţă de verticală (axa V); φ – unghiul proiecţiei direcţiei punctelor de intrare şi de ieşire în plan orizontal faţă de axa H1; Σ – unghiul dintre axele de intrare şi de ieşire; ωi (ni) – viteza unghiulară (turaţia) de intrare ωe (ne) – viteza unghiulară (turaţia) de ieşire; iR – raportul de transmitere total, iR = ωi / ωe = ni/ne; ηR –
randamentul; Mti – momentul de torsiune de intrare Mte – momentele de torsiune de ieşire, Mte = (Mti/ iR) ηR; Pi
– puterea la intrare; Pe – puterea la ieşire, Pe = Pi ηR |
TRD-T.8.1.2
Model structural-funcţional al reductoarelor conico-cilindrice
Reductoarele conice se folosesc pentru transmiterea puterii între arbori cu axe concurente pentru rapoarte de transmitere i = 1…6.
Reductoarele conico-cilindrice de uz general sunt cu două sau trei trepte şi cu angrenajul conic la intrare deoarece acesta are pinionul în consolă (condiţii de angrenare înrăutăţite) şi deci capacitatea portantă mai mică.
Tab. TRD-T.8.1.1
Schema structural-
funcţională
|
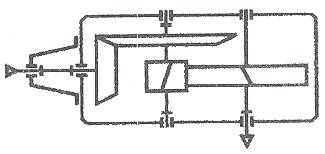
Fig. TRD-T.8.1.1 Schema structural-funcţională |
Structura funcţională: I – angrenaj conic ortogonal cu raportul de transmitere iI; II – angrenaj cilindic cu raportul de transmitere iII . Funcţia de transmitere a puterii:
Funcţia de transmitere a mişcării:
Funcţia de transmitere a momentului de torsiune:
Semnificaţiile parametrilor: Pi – puterea la arborele de intrare; Pe – puterea la arborele de ieşire; Mti – momentul de torsiune la arborele de intrare; Mte – momentul de torsiune la arborele de ieşire;
ωi
(ni) – viteza unghiulară
(turaţia) arborelui de intrare; ωe
(ne) – viteza unghiulară (turaţia) arborelui de
ieşire;
|

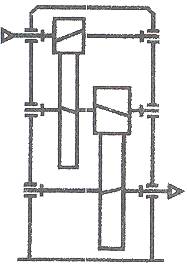
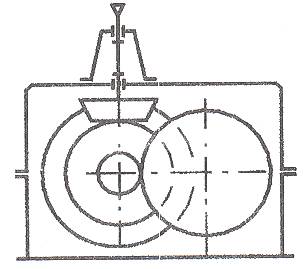
Tab. TRD-T.8.1.2 Schema structural- constructivă a reductoarelor conico-cilindrice
|
a
b c d
e
Fig. TRD-T.8.1.2 Schema structural-constructivă: a – de ansamblu; b – a subansamblului arborelui de intrare; c – a subansamblului arborelui intermediar; d – a subansamblului arborelui de ieşire; e – a subansamblului carcasei |
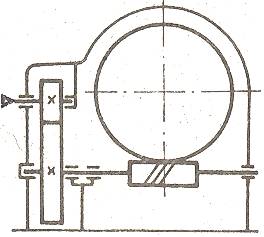
Fig. TRD-T.8.1.3 Schema bloc structural-constructivă
Semnificaţiile parametrilor din fig. TRD-T.8.1.2 şi TRD-T.8.1.3: Angrenaje: I – angrenaj conic
ortogonal cu dantură, înclinată sau curbă; II – angrenaj cilindic
cu dantură înclinată Roţi dinţate:
1I
– pinion
conic, 2I – roată
conică
Arbori: A1
– arbore
de intrare
Lagăre:
Subansamble:
SC
– subasamblul carcasă; Montaje cu
rulmenţi (sisteme de lăgăruire):
Obs. Montajele cu rulmenţi (sistemele de lăgăruire) fiind entităţi funcţionale independente nu sunt structuri constructive de asamblare distincte |




 -
lagărul A al arborelui A
-
lagărul A al arborelui A



 - montajul cu rulmenţi
al arborelui
- montajul cu rulmenţi
al arborelui 

TRD-T.8.1.2.1
Modelarea încărcărilor (forţelor şi momentelor) din reductoarele conico-cilindrice
Tab. TRD-T.8.1.2.1 Forţe în reductoarele conico-cilindrice
|
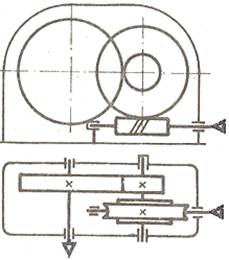
Fig. TRD-T.8.1.4 Schema forţelor detaliată |
Forţele din angrenajul conic, I:
Forţele din angrenajul cilindric,
II:
|
|
Fig. TRD-T.8.1.2.1 Schema forţelor simplificată |
-
reprezentare
transmisie în două vederi ortogonale; - marcarea în cele două vederi a sensurilor de rotaţe ale roţilor;
-
marcarea
forţelor tangenţiale;
-
marcarea
forţelor radiale;
-
marcarea
forţelor axiale
Direcţiile şi sensurile
forţelor din angrenaje: Forţa tangenţială: direcţie tangentă
la cercurile de rostogolire; sensul opus vitezei (forţă
rezistentă), pentru roata conducătoare, şi acelaşi sens
cu viteza (forţă motoare), pentru roata condusă Forţa radială: direcţie radială; sensul spre
centrul roţii Forţa axială: direcţie axială; sensul
determinat de direcţia de înclinare a dintelui şi de sensul de
rotaţie al roţii |





 - forţa axială de acţiune
a pinionului conic conducător,
- forţa axială de acţiune
a pinionului conic conducător,  – forţa radială de
reacţiune a roţii conice condusă (
– forţa radială de
reacţiune a roţii conice condusă (




 – forţa radială de
reacţiune a roţii cilindrice condusă (
– forţa radială de
reacţiune a roţii cilindrice condusă (


 )
)|
Fig. TRD-T.8.1.2.2 Fluxuri de forţe în reductoarele conico-cilindrice |
|
Obs. Identificarea fluxurilor forţelor permite stabilirea judicioasă a schemelor de încărcare la proiectare. |
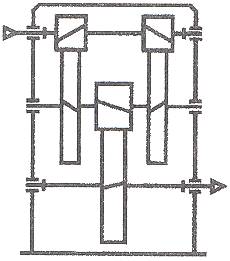
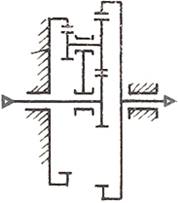
TRD-T.8.1.3 Model structural-funcţional al transmisiilor planetare (reductoare/multiplicatoare)
Unitatea planetară (fig. TRD-T.8.1.3.1) este un mecanism diferenţial cu următoatrele elemente: roţile centrală (cu dantură la exterior) 1 şi 2 (cu dantura la interior); sateliţii 3 şi braţul portsateliţi H.
Tab. TRD-T.8.1.3.1 Situaţii de funcţionare a unităţii planetare
|
Fig. TRD-T.8.1.3.1 Schemă unitate planetară |
Raportul de transmitere interior (al mecanismului cu axe fixe, cu braţul portsateliţi blocat),
Semnul - arată că roaţile centrale 1 şi 2 au sensuri de rotaţie opuse. Condiţia de coaxialitate a roţilor centrale (1,2), z2 - z1 = 2 zs. Condiţia de montaj care impune ca dinţii sateliţilor să intre în golurile roţilor centrale, cu dantură la exterior respectiv interior, se sintetizează în relaţia, z2 + z1 = ns S, în care, ns este numărul de sateliţi şi N - un număr întreg. |
|
|
|
Principala metodă de analiză a mecanismelor planetare este inversiunea mişcărilor care conduce la mecanisme cu axe fixe cu aceleaşi mişcări relative între elemente şi cu aceleaşi forţe şi momente statice. Deci, calculul organologic al transmisiilor planetare se reduce la calculul organologic al unităṭilor cu axe fixe.
Situaţii de funcţionare unităţii planetare: ca unitate monomobilă cu axă fixă când braţul portsateliţi fix (tab. TRD-T.8.1.3.2, coloanele a şi b); ca unitate planetară monomobilă cu axă mobilă (cu braţul portsateliţi rotitor) când una din roţile centrale este fixă (tab. TRD-T.8.1.3.2, coloanele c, d, e şi f); ca unitate planetară bimobilă (diferenţială) când braţul portsateliţi şi roţile centrale sunt mobile.
Tab. TRD-T.8.1.3.2 Situaţii de funcţionare a unităţii planetare
|
Varianta |
a |
b |
c |
d |
e |
f |
|
Schema |
|
|
|
|
|
|
|
Rap. de transm. |
|
|
|
|
|
|
|
În cazul neglijării frecărilor (randamente unitare) parametrii cinetostatici (puterea, viteza unghiulară şi momentul de tosiune) de ieşire (indice e = 1,2,H) se determină în funcţie de parametrii cinetostatici de intrare (indice i = 1,2,H) cu relaţiile,
în care,
|
||||||