PRC-T PROIECTAREA CONSTRUCTIVĂ A ELEMENTELOR PRODUSELOR TEHNICE MECANICE
PRC-T.3 CALCULUL DE REZISTENŢĂ ŞI DE RIGIDITATE (DEFORMAŢII) A ELEMENTELOR MAŞINILOR
|
CUPRINS |
PRC-T.3.1 CALCULUL DE REZISTENŢĂ AL ELEMENTELOR MAŞINILORPRC-T.3.1.1 STRUCTURA GENERALĂ A SISTEMELOR DE CORPURI ÎN INTERACŢIUNE PRC-T.3.1.2 MODELAREA GEOMETRICĂ A ELEMENTELOR STRUCTURILOR MECANICE PRC-T.3.1.3 MODELAREA LEGĂTURILOR (REAZEMELOR) DINTRE CORPURI PRC-T.3.1.4 MODELAREA SARCINILOR PRC-T.3.1.4.1 MODELAREA SARCINILOR EXTERIOARE (ÎNCĂRCĂRILOR) PRC-T.3.1.4.2 MODELAREA SARCINILOR INTERIOARE (EFORTURILOR) PRC-T.3.1.5 MODELAREA SOLICITĂRILOR PRC-T.3.1.5.1 MODELAREA SOLICITĂRILOR DE VOLUM PRC-T.3.1.5.1.1 Modelarea solicitărilor de volum simple PRC-T.3.1.5.1.2 Modelarea solicitărilor de volum compuse PRC-T.3.1.5.2 MODELAREA SOLICITĂRILOR DE SUPRAFAŢĂ PRC-T.3.1.5.2.1 Modelarea solicitărilor de strivire pe suprafaţe conforme plane PRC-T.3.1.5.2.2 Modelarea solicitărilor de strivire pe suprafaţele conforme cilindrice PRC-T.3.1.6 TENSIUNI ADMISIBILE ŞI COEFICIENŢI DE SIGURANŢĂ PRC-T.3.2 CALCULUL DE RIGIDITATE (DEFORMAŢII) AL ELEMENTELOR MAŞINILORPRC-T.3.2.1 MODELAREA DEFORMAŢIILOR ŞI DEPLASĂRILOR DE VOLUM PRC-T.3.2.2 DEPlASĂRI ADMISIBILE ŞI COEFICIENŢI DE SIGURANŢĂ |
PRC-T.3.1 CALCULUL DE REZISTENŢĂ AL ELEMENTELOR MAŞINILOR
PRC-T.3.1.1 STRUCTURA GENERALĂ A SISTEMELOR DE CORPURI ÎN INTERACŢIUNE
|
|
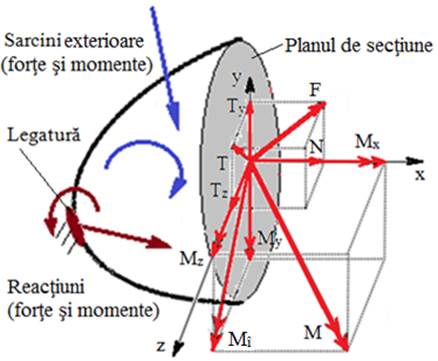
Aspecte generale despre structurile funcţionale ale produselor mecanice: - corpurile care îndeplinesc rol funcţional de transmitere de forţe (sarcini) în cadrul unei structuri mecanice a unui produs (maşină, instalaţie, utilaj etc.) şi sunt supuse la diverse solicitări, sunt cunoscute sub denumirea de elemente de rezistenţă sau elemente (organe) de maşină; - elementele maşinilor sunt în interacţiune prin intermediul legăturilor (fixe sau mobile) care se idealizeză prin reazeme şi cuple cinematice şi se materializeză prin diverse soluţii constructive (asamblări, îmbinări, lagăre etc.); - în reazeme şi cuple cinematice pot exista mişcări relative şi forţe de reacţiune; - elementele maşinilor pot fi încărcate cu sarcini exterioare, forţe şi/sau momente, concentrate sau distribuite (pe linie, pe suprafaţă şi/sau în volum); - consecinţă a acţiunii încărcărilor (sarcinilor) externe şi interne în interiorul corpurilor apar tensiuni (normale şi/sau tangenţiale) şi pe suprafeţele presiuni de contact; - tensiunile din elementele constructive se însumează în punctele din interior în forţe interioare (eforturi) şi în punctele suprafeţelor de contact din reazeme în forţe de reacţiune |
|
Fig. PRC-T.3.1.1.1 Modelul general al unui sistem de corpuri în interacţiune |
PRC-T.3.1.2 MODELAREA GEOMETRICĂ A ELEMENTELOR STRUCTURILOR MECANICE
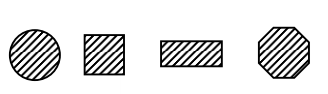
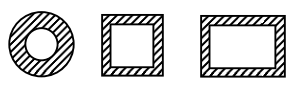
Elementele constructive ale produselor mecanice, ţinând cont de raportul dintre dimensiunile lor, se pot reduce (simplifica) la trei categorii: bare (rigide sau flexibile), cu o dimensiune mult mai mare în comparaţie cu celelalte două; plăci cu două dimensiuni mult mai mari decât cea de-a treia; elemente masive (blocuri) cu cele trei dimensiuni comparabile (bile, roţi, flanşe, tuburi cu pereţi groşi, volanţi etc.).
Tab. PRC-T.3.1.2.1 Clasificarea elementelor constructive de tip bară
|
Criteriul |
Tipul |
Schema |
Descriere |
|
Forma fibrei medii (locul geometric al centrelor de greutate ale formelor secţionale) |
Drepte |
Fig. PRC-T.3.1.2.2,a |
Se materializează ca arbori, bolţuri, şuruburi etc. |
|
Cotite |
Fig. PRC-T.3.1.2.2,b |
Se materializează ca arbori cotiţi |
|
|
Curbe |
Fig. PRC-T.3.1.2.2,c,d |
Se materializează ca elemente rigide (cârligul de remorcare) sau flexibile |
|
|
Forma secţiunii transversale |
Cu secţiune plină |
Fig. PRC-T.3.1.2.1,a |
Pot fi cu secţiune circulară, pătrată, dreptunghiulară hexagonală etc. |
|
Cu secţiune deschisă |
Fig. PRC-T.3.1.2.1,b |
Pot fi cu ptofil semcircular, U, I, L etc. |
|
|
Cu secţiune cu goluri |
Fig. PRC-T.3.1.2.1,c |
Cu profil circular, pătrat, dreptunghiular, compus din forme simple etc. |
|
|
Tipul solicitării principale |
Tiranţi |
Fig. PRC-T.3.1.2.1,a |
Solicitarea principală este tracţiunea (întinderea) |
|
Sarme, cabluri |
Fig. PRC-T.3.1.2.1,d |
||
|
Stâlpi (coloane) |
Fig. PRC-T.3.1.2.1,b |
Solicitarea principală este compresiunea |
|
|
Grinzi |
Fig. PRC-T.3.1.2.1,c |
Solicitarea principală este încovoierea |
|
|
Arbori |
Fig. PRC-T.3.1.2.1,a,b |
Solicitările principale pentru arborii rigizi sunt: torsiunea şi încovoierea |
|
|
|
|
|
a |
b |
c |
|
Fig. PRC-T.3.1.2.1 Formele secţiunilor barelor: a – plină; b – deschisă; c – tubulară (ţeavă) |
||

|
|
|
|
|
|
a |
b |
c |
d |
|
Fig. PRC- PRC-T.3.1.2.2 Formele fibrelor medii ale barelor: a – dreaptă (arbore drept); b – cotită (arbore cotit); c – curbă, rigidă; d – curbă, flexibilă (cablu); |
|||



|
|
|
|
|
|
a |
b |
c |
d |
|
Fig. PRC- PRC-T.3.1.2.3 Exemple de elemente constructive de tip bară: a – tirant; b – coloană (stâlp); c – grindă; d – bară spaţială |
|||




Tab. PRC-T.3.1.2.2 Clasificarea elementelor constructive de tip placă
|
Criteriul |
Tipul |
Schema |
Descriere |
|
|
Forma suprafeţei mediane |
Plane |
Fig. PRC-T.3.1.2.4 |
Suprfaţa mediană este plană |
|
|
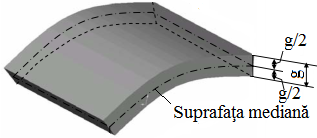
Curbe |
Suprfaţa mediană este spaţială |
|||
|
Grosimea |
Membrane (plăci subţiri) |
Au grosimi mici şi nu preiau forţe transversale |
||
|
Învelitori |
Au grosimi foarte mici şi nu preiau momente de încovoiere |
|||
|
Dale (plăci groase) |
Au grosimi mari şi dimensiuni ale suprafaţei mediane reduse |
Fig. PRC-T.3.1.2.4 Descrierea plăcilor |
PRC-T.3.1.3 MODELAREA LEGĂTURILOR (REAZEMELOR) DINTRE CORPURI
Legăturile modelează interacţiunile dintre două elemente constructive prin reazeme care, la rândul lor, sunt materializate prin elemente sau subansamble de legătură (asamblări, lagăre, îmbinări) specifice sau specializate; Legăturile pot fi fixe, fără mişcări relative (numai cu reacţiuni) sau mobile, cu mişcări relative (cuple cinematice în care apar reacţiuni în direcţia mişcărilor anulate.
Tab. PRC-T.3.1.3.1 Clasificarea reazemelor
|
Criteriul |
Tipul |
Schema |
Descriere |
|
Domeniul geometric |
Plane |
Fig. PRC-T.3.1.3.1,a,b,c,d |
Deplasările şi rotirile după una din axele transversale sunt nule; rigidităţile elementelor în această direcţie sunt infinite |
|
Spaţiale |
Fig. PRC-T.3.1.3.1,e,f,g |
Pot fi rigide sau elastice |
|
|
Gradele de mobilitate anulate |
Cu o constrângere |
Fig. PRC-T.3.1.3.1,a,b |
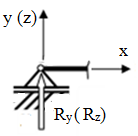
Permit 5 mişcări relative în cazul reazemelor spaţiale şi 2 pentru cele plane |
|
Cu 2 constrângeri |
Fig. PRC-T.3.1.3.1,c,e |
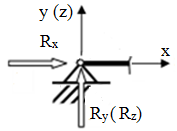
Permit 4 mişcări relative în cazul reazemelor spaţiale şi una pentru cele plane |
|
|
Cu 3 constrângeri |
Fig. PRC-T.3.1.3.1,d,f |
Permit 3 mişcări relative în cazul reazemelor spaţiale |
|
|
Cu 4 constrângeri |
- |
Permit 2 mişcări relative în cazul reazemele spaţiale |
|
|
Cu 5 constrângeri |
- |
Permit o mișcare relativă pentru reazemele spaţiale |
|
|
Cu 6 constrângeri |
Fig. PRC-T.3.1.3.1,g |
Nu permit mişcări relative (sunt materializate de asamblările şi îmbinările nedemontabile) |
|
|
Rigiditaea elementelor rezemate |
Rigide |
Fig. PRC-T.3.1.3.1,b … g |
Nu se iau în considerare deformaţiile elastice din legături |
|
Elastice |
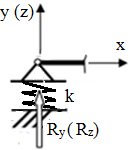
Fig. PRC-T.3.1.3.1,a |
Se iau în considerare deformaţiile elastice prin intermediul unor elemente elastice |
|
|
|
|
|
|
|
|
|
a |
b |
c |
d |
e |
f |
g |
|
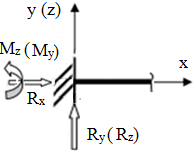
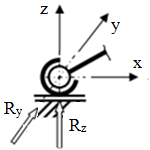
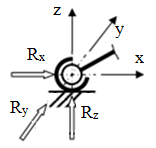
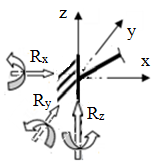
Fig. PRC-T.3.1.3.1 Tipuri uzuale de reazeme: a – reazem elastic mobil plan; b – reazem mobil plan; c – reazem fix plan (articulaţie cilindrică) ; d – încastrare plană; e – reazem mobil spaţial; f – reazem fix spaţial (articulaţie sferică); g – încastrare spaţială |
||||||
PRC-T.3.1.4 MODELAREA ÎNCĂRCĂRILOR (SARCINILOR)
PRC-T.3.1.4.1 MODELAREA SARCINILOR EXTERIOARE (ÎNCĂRCĂRILOR)
Tab. PRC-T.3.1.4.1.1 Clasificarea sarcinilor exterioare
|
Criteriul |
Tipul |
Schema |
Descriere |
|
Domeniul în care acţionează |
Exterioare (sarcini) |
Fig. PRC-T.3.1.4.1 |
Sarcinile exterioare sunt rezultatul acţiunii unor câmpuri fizice (mecanice, termice, electromagnetice) |
|
Interioare (eforturi) |
Fig. PRC-T.3.1.4.2 |
Acţionează în interiorul corpurilor şi se determină prin însumarea tensiunilor interne |
|
|
De legătură (reacţiuni) |
Fig. PRC-T.3.1.3.1 |
Acţionează ca forţe de reacţiune şi se determină prin însumarea presiunilor de pe suprafeţele în contact |
|
|
Suportului pe care acţionează |
În punct (concentrat) |
Fig. PRC-T.3.1.1.1 |
Acționează pe suprafeţe foarte mici ce se pot reduce, teoretic, la un punct |
|
Pe linie |
Acționează pe o suprafaţă cu lungime mare şi îngustă ce se poate reduce la o linie |
||
|
Pe suprafaţă |
Acționează pe suprafeţe exterioare şi interioare ale elementelor constructive |
||
|
În volum |
Pot acţiona, rareori, numai în anumite părţi ale volumului corpului sau, frecvent, în tot volumul (forţe de greutate, centrifugă, electromagnetică etc.) |
||
|
Distribuţiei pe suportul care acţionează |
Distribuite uniform |
Fig. PRC-T.3.1.1.1 |
Sunt valabile pentru sarcinile aplicate pe contururi, suprafeţe şi volume |
|
Distribuite neuniform |
|||
|
Modul de aplicare în timp |
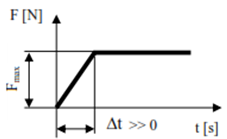
Statice |
Fig. PRC-T.3.1.4.1,a |
Se consideră aplicate lent şi nu implică efecte dinamice |
|
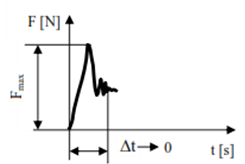
Dinamice aplicate brusc (cu şoc) |
Fig. PRC-T.3.1.4.1,d |
Sunt aplicate în timpi scurţi şi se consideră efectele dinamice (inerţiale) |
|
|
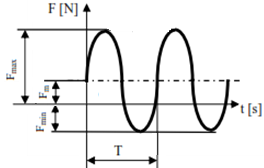
Variabile periodic |
Fig. PRC-T.3.1.4.1,b |
Variaţiile în timp, periodice pulsatorii sau alternante, au efecte asupra rezistenţei la oboseală în perioade de funcţionare mărite (durabilitate) |
|
|
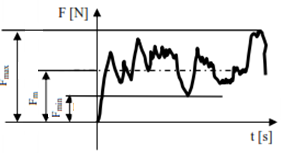
Variabile aleatoriu |
Fig. PRC-T.3.1.4.1,c |
Variaţiile în timp, aleatorii, au efecte asupra rezistenţei la oboseală în perioade de funcţionare mărite (durabilitate) |
|
|
Mobilitatea suportului pe care acţionează |
Fixe |
- |
Acţiunea acestor sarcini rămâne invariabilă (calcule de rezistenţă liniare) |
|
Mobile |
- |
Pentru calcule de proiectare, din toate stările posibile de încărcare, se consideră cea care produce încercarea cea mai defavorabilă |
|
|
Obs. Reacţiunile din reazeme (fig. PRC-T.3.1.3.1), ca sarcini exterioare indirecte, frecvent, se modelează ca forţe şi momente concentrate |
|||
|
|
|
|
|
|
a |
b |
c |
d |
|
Fig. PRC-T.3.1.4.1.1 Tipurile sarcinilor exterioare (forţe sau momente): a – statică; b – variabilă periodic; c – variabilă aleatoriu; d – cu şoc; |
|||
PRC-T.3.1.4.2 MODELAREA SARCINILOR INTERIOARE (EFORTURILOR)
Tab. T.3.1.4.1.2 Clasificarea eforturilor secţionale
|
|
Criteriul |
Tipul efortului |
Descriere |
|
|
Poziţia în raport cu planul de secţiune |
Normal (axial) |
N, Mx - au direcţia după axa x, normală pe planul de secţiune |
||
|
Tangenţial |
Ty,z, My,z, T, Mî - au direcţia în planul de secţiune, y-z |
|||
|
Solicitările asociate |
De tracţiune/compresiune |
N – efort axial de tracţiune/compresiune |
||
|
De forfecare |
Ty,z – eforturi de forfecare,
|
|||
|
De torsiune (axial) |
Mx – efort axial de torsiune; |
|||
|
De încovoiere |
My,z – eforturi de încovoiere,
|
|||
|
Luarea în considerare ca şi componentă sau ca rezultantă |
Parţial (componentă) |
Ty,z, Mx,y,z – componentele eforturilor T şi M |
||
|
Rezultant |
|
|||
|
Fig. PRC-T.3.1.4.2.1 Componentele eforturilor secţionale |
PRC-T.3.1.5 MODELAREA SOLICITĂRILOR
Ipotezele calculelor de rezistenţă:
- continuităţii, conform căreia corpurile se consideră continue făcând abstracţie de structura sa cristalină;
- izotropiei, conform căreia materialele au aceleaşi proprietăţi după oricare direcţie, (care trece printr-un anumit punct);
- omogenităţii, corpurile considerându-se omogene, cu aceleaşi proprietăţi;
- micilor deplasări, conform căreia deplasările diferitelor puncte ale corpului sunt mult mai mici în comparaţie cu dimensiunile sale;
- elasticităţii perfecte, conform căreia corpurile revin la forma iniţială după încetarea încărcării exterioare;
- dependenţei liniare dintre forţă şi deplasare F= k δ, unde k = constantă (rigiditate);
- suprapunerii de efecte, conform căreia starea finală de echilibru nu depinde de ordinea de aplicare a sarcinilor;
- constanţei secţiunii transversale, pentru simplificarea relaţiilor de calcul;
- solicitărilor neglijabie, pentru simplificarea relaţiilor de calcul se omit solicitările care se dovedesc nesmnificative;
- lui Saint-Venant, conform căruia într-o secţiune depărtată de zona de încărcare a corpului, solicitarea nu depinde de modul încărcării;
- lui Bernoulli conform căreia o secţiune plană şi normală pe axa elementului de rezistenţă rămâne plană şi normală şi pe axa sa deformată
Tab. PRC-T.3.1.5.1 Clasificarea solicitărilor mecanice
|
Criteriul |
Tipul solicitării |
Schema |
Descriere |
|
Domeniul geometric în care se manifestă |
De volum |
Tab. PRC-T.3.1.5.1 |
Fac obiectul de studiu al rezistenţei materialelor |
|
De suprafaţă |
Tab. PRC-T.3.1.5.2 |
Fac obiectul de studiu al rezistenţei materialelor şi tribologiei |
|
|
După numărul de eforturi într-o secţiune |
Simple |
Tab. PRC-T.3.1.5.1.1.1 |
Au un singur efort (solicitări simple) |
|
Compuse |
Tab. PRC-T.3.1.5.1.2.1 |
Au cel puţin două eforturi (solicitări compuse) |
|
|
Tipul sarcinii |
Statice |
Fig. PRC-T.3.1.4.1.1,a |
Sarcina se aplică lent şi se consideră independentă de timp |
|
Dinamice |
Fig. PRC-T.3.1.4.1.1,d |
Sarcina este variabilă în timp; se consideră pentru perioade de timp reduse (foarte scurte), de obicei, pentru calcule în regimuri tranzitorii (şoc sau impact) |
|
|
Variabile |
Fig. PRC-T.3.1.4.1.1,b,c |
Sarcina este variabilă în timp (periodic sau aleatoriu); se consideră perioade de timp îndelungate (comparabile cu durata de viaţă a produsului), pentru calculul la oboseală; în funcţie de material cedările (ruperile) se produc la tensiuni mai mici decât tensiunea corespunzătoare limitei de curgere (rupere) pentru solicitarea statică |
PRC-T.3.1.5.1 MODELAREA SOLICITĂRILOR DE VOLUM
PRC-T.3.1.5.1.1 Modelarea solicitărilor de volum simple
Solicitările simple sunt determinate de un singur efort.
Tab. PRC-T.3.1.5.1.1.1 Solicitări mecanice simple
|
Solicitarea |
Schema |
Modelul matematic |
Semnificaţiile parametrilor |
|
|
Scop |
Relaţii de calcul |
|||
|
Tracţiune, compresiune |
|
Verificare |
|
Ft,c [N] – forţa de tracţiune, compresiune; At,c [mm2] – aria secţiunii barei solicitată la tracţiune, compresiune; σt,c [MPa] – tensiunea de tracţiune, compresiune maximă; σat,c [MPa] – tensiunea admisibilă de tracţiune, compresiune; Ft,c cap [N] – forţa de tracţiune, compresiune capabilă |
|
Dimensionare |
|
|||
|
Sarcina capabilă |
|
|||
|
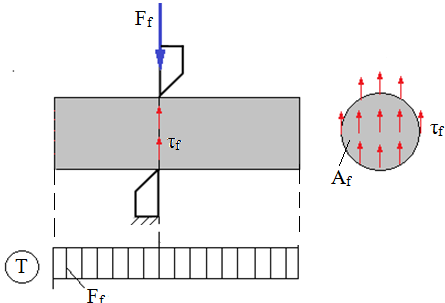
Forfecarea (tăierea) pură |
|
Verificare |
|
Ff [N] – forţa de forfecare;
Af [mm2] – aria secţiunii de forfecare;
τf [MPa] – tensiunea de forfecare maximă;
τaf [MPa] – tensiunea admisibilă de forfecare;
Ff cap [N] – forţa de forfecare capabilă |
|
Dimensionare |
|
|||
|
Sarcina capabilă |
|
|||
|
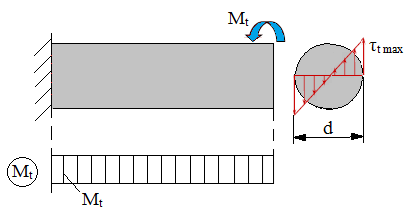
Torsiunea (răsucirea) |
|
Verificare |
|
Mt [Nmm] – momentul de torsiune (răsucire); Wp [mm3] – modulul de rezistenţă polar;
τt max [MPa] – tensiunea de torsiune maximă; τat [MPa] – tensiunea admisibilă de torsiune; Mt cap [Nmm] – momentul de torsiune capabil |
|
Dimensionare |
|
|||
|
Sarcina capabilă |
|
|||
|
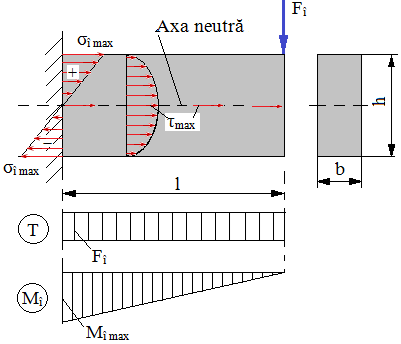
Încovoierea |
|
Verificare |
|
Mî max [Nmm] – momentul de încovoierre maxim; Fî [N] – forţa de încovoierre; Wz [mm3] – modulul de rezistenţă axial;
σî max [MPa] – tensiunea de încovoiere maximă, din relaţia lui Navier; τ max [MPa] – tensiunea de forfecare maximă, din relaţia lui Juravski; A = b h [mm2] – aria secţiunii barei; σaî [MPa] – tensiunea admisibilă de încovoiere; Mî cap [MPa] – momentul de încovoiere capabil |
|
Dimensionare |
|
|||
|
Sarcina capabilă |
|
|||

PRC-T.3.1.5.1.2 Modelarea solicitărilor de volum compuse
Solicitările compuse sunt determinate de două sau mai multe tensiuni.
Tab. PRC-T.3.1.5.1.2.1 Clasificarea solicitărilor compuse
|
Criteriul |
Tipul |
Schema |
Descriere |
|
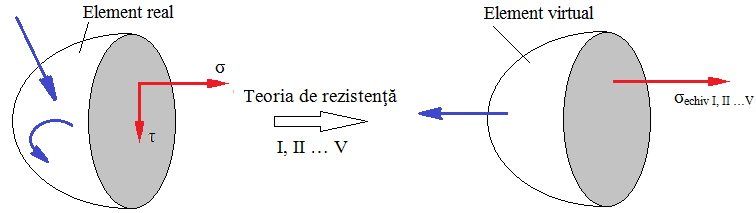
Tipul tensiunilor participante |
De aceeaşi natură (σ sau τ) cu direcţii paralele |
Fig. PRC-T.3.1.5.1.2.1 |
Dacă tensiunile au aceeaşi direcţie, tensiunea rezultantă se calculează ca suma algebrică a tensiunilor componente,
Solicitări posibile: axială excentrică, încovoiere oblică, axială (întindere sau compresiune) şi încovoiere; forfecare cu torsiune (răsucire) |
|
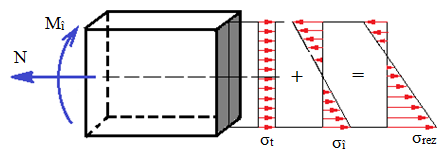
De natură diferită (σ şi τ) cu direcţii diferite |
Fig. PRC-T.3.1.5.1.2.2 |
În acest caz se impune determinarea unei tensiuni echivalente care apare într-un element imaginar (virtual) supus la întindere, din acelaşi material, şi care produce o stare de solicitare cu tensiunea σ tot atât de periculoasă (echivalentă) ca şi cea reală cu tensiuni σ şi τ. Tensiunea echivalentă se determină, pe baza unor criterii de echivalare numite teorii de rezistenţă (tab. PRC-T.3.1.5.1.2.2) şi se compară cu tensiuni admisibile (PRC-T.3.1.5.1.2.1) bazate pe tensiuni limită, uşor de determinat experimental. Solicitări compuse posibile: încovoiere şi răsucire; tracţiune, încovoiere şi răsucire |
|
|
|
|
Fig. PRC-T.3.1.5.1.2.1 Însumarea tensiunilor de aceeaşi natură (σ) |
Fig. PRC-T.3.1.5.1.2.2 Echivalarea stărilor de tensiuni compuse |
Tab. PRC-T.3.1.5.1.2.2 Teorii de rezistenţă
|
Nr. teoriei |
Ipoteza de echivalare |
Relaţia de echivalare |
Descriere |
|
1 |
Tensiunea normală maximă |
|
S-a confirmat experimental în cazul ruperii materialelor fragile solicitate la tracţiune; în cazul stărilor compuse de tensiuni conduce la supradimensionări |
|
2 |
Deformaţiei liniare maxime |
|
Se recomandă pentru materiale fragile |
|
3 |
Tensiunii tangenţiale maxime |
|
S-a verificat experimental pentru materialele tenace la solicitările de întindere simple şi mixte; această teorie este cea mai acoperitoare, conduce la diferenţe (dimensiuni) mai mari şi se foloseşte frecvent pentru calculele de proiectare. |
|
4 |
Energiei de deformaţie |
|
- |
|
6 |
Energiei de deformaţie modificatoare de formă |
|
A fost verificată experimental pentru materialele tenace şi corespunde mai bine cu realitatea decât toate celelalte teorii; această teorie are o largă utilizare în proiectare deoarece conduce la diferenţe mai mici (dimensiuni apropiate de cele necesare) |
PRC-T.3.1.5.2 MODELAREA SOLICITĂRILOR DE SUPRAFAŢĂ
PRC-T.3.1.5.2.1 Modelarea solicitărilor de strivire pe suprafețe conforme plane
Tab. PRC-T.3.1.5.2.1.1 Calculul la strivire a suprafeţelor conforme plane
|
|
|
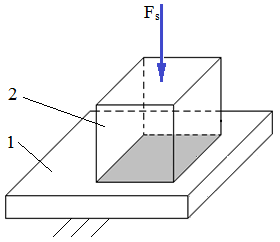
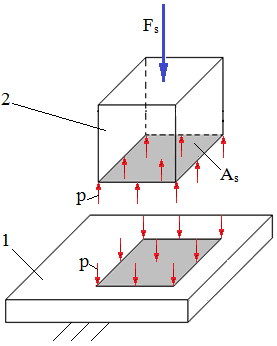
Ipoteze de calcul: - presiunea pe suprafaţa de contact se consideră uniform distribuită; - forţa se aplică perpendicular pe planul de contact Condiţia de echilibru pe direcţia forţei exterioare:
unde, Fs este forţa exterioară, p - presiunea pe suprafaţa de contact, As – aria suprafeţei de contact Relaţii de calcul: - de verificare,
- de dimensionare,
- sarcina capabilă,
unde, σas = min(σas1, σas2) cu σas1 şi σas2 tensiunile admisibile la strivire ale materialelor corpurilor 1 şi respectiv, 2 sau σas = pa, presiunea admisibilă a peliculei de lubrifiant, pentru cazul în care corpurile sunt în mişcare relativă cu ungere |
|
a |
b |
|
|
Fig. PRC-T.3.1.5.2.1.1 Modelul de calcul la strivire a suprafeţelor conforme plane: a – schema generală; b – parametri de calcul |
||
|
Obs. a. Tensiunile de suprafaţă (strivire), în cazul mişcărilor relative, determină, din cauza frecării, pierderi de energie şi de material (uzură) şi deci, modificări ale suprafeţelor în contact; minimizarea acestor pierderi energetice şi de material, sunt obiective ale tribologiei (ETB-T) |
||
PRC-T.3.1.5.2.2 Modelarea solicitărilor de strivire pe suprafaţele conforme cilindrice
Tab. PRC-T.3.1.5.2.2.1 Calculul la strivire a suprafeţelor conforme cilindrice
|
|
|
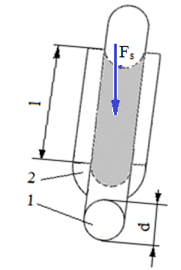
|
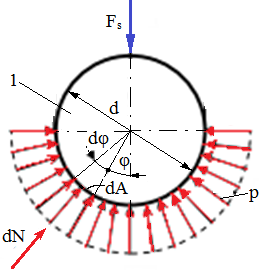
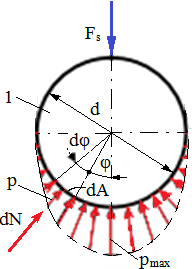
Ipoteze de calcul: - forţa se aplică perpendicular pe axa longitudinală a suprafeţei de contact; - distribuţia presiunii pe suprafaţa de contact poate fi: - cazul 1: bolţul este montat cu joc redus sau cu strângere şi presiunea pe suprafaţa de contact se consideră uniform distribuită pe circumferinţă şi pe generatoare; - cazul 2: bolţul este montat cu joc mărit şi presiunea pe suprafaţa de contact se consideră distribuită cosinusoidal pe circumferinţă după legea, p = pmax cosφ, şi uniform distribuită pe generatoare
|
|
|
a |
b |
c |
||
|
Fig. PRC-T.3.1.5.2.2.1 Schema de calcul la strivire a suprafeţelor conforme cilindrice: a – parametri de calcul; b – cazul 1, distribuţia uniformă a presiunilor de contact; c – cazul 2, distribuţia cosinusoidală a presiunilor de contact |
||||
|
Cazul 1. Condiţia de echilibru a forţelor:
(PRC-T.3.1.5.2.2.1)
Relaţii de calcul: - de verificare,
- de dimensionare,
- sarcina capabilă,
unde, As = d l este aria convenţională de strivire a proiecţiei suprafeţei de contact în direcţie axială; σas = min(σas1, σas2) cu σas1 şi σas2 tensiunile admisibile la strivire ale materialelor corpurilor 1 şi respectiv, 2 sau σas = pa [MPa], presiunea admisibilă a peliculei de lubrifiant. |
Cazul 2. Condiţia de echilibru a forţelor:
Relaţii de calcul: - de verificare,
- de dimensionare,
- sarcina capabilă,
unde, As = 0,8 d l reprezintă 0,8 din aria dreptunghiului axial ca proiecţie a suprafeţei de contact în direcţie axială; σas = min(σas1, σas2) cu σas1 şi σas2 tensiunile admisibile la strivire ale materialelor corpurilor 1 şi respectiv, 2 sau σas = pa [MPa], presiunea admisibilă a peliculei de lubrifiant. |
|||


PRC-T.3.1.6 TENSIUNI ADMISIBILE ŞI COEFICIENŢI DE SIGURANŢĂ
Tab. PRC-T.3.1.6.1 Condiţii de rezistenţă pentru evitarea deteriorărilor şi cedărilor
|
Criteriul |
Relaţii |
Descriere |
|
Deteriorarea prin depăşirea limitei de curgere |
|
σa = σ02 /c (σa = σc /c) – tensiunea admisibilă raportată la limita de curgere pentru materiale tenace (ductile); uzual, c = 1,2…3 – coeficient de siguranţă pentru evitarea deteriorării prin deformare plastică |
|
Deteriorarea prin depăşirea limitei de rupere |
σa = σr /c – tensiunea admisibilă raportată la rezistenţa de rupere pentru materiale fragile; uzual, c = 3…4 – coeficient de siguranţă pentru evitarea cedării prin rupere |
|
|
Obs. a. Coeficientul de siguranţă este un parametru care depinde de tipul materialului, tehnologia de obţinere a semifabricatului, mărimea şi tipul sarcinilor aplicate, regimul de funcţionare, modelul de calul (modele de calcul simple implică multe ipoteze simplificatoare şi deci coeficient de siguranţă cu valori mari), condiţiile şi mediul de lucru etc. b. τa = 0,8 σa, pentru o mare categorie de materiale |
||
PRC-T.3.2 CALCULUL DE RIGIDITATE (DEFORMAŢII) AL ELEMENTELOR MAŞINILOR
Deformaţiile elastice (cu revenire la starea iniţială) şi/sau plastice (fără revenire la starea iniţială) reprezintă măsuri (valori) ale modificării (creşterii sau scăderii) distanţei dintre două puncte sau două secţiuni (deformaţii liniare), respectiv ale unghiurilor dintre două secţiuni (deformaţii unghiulare sau lunecări) ale unei structuri.
Deplasările sau săgeţile (liniare sau unghiulare) reprezintă valori ale distanţei, respectiv, unghiurilor dintre poziţiile (de obicei, iniţiale şi finale) unui punct sau ale unei secţiuni dintr-o structură; deplasările ca şi consecinţă a deformării (modificării formei) corpului pot fi: elastice (dispar după anularea sarcinii), elasto-plastice sau plastice.
PRC-T.3.2.1 MODELAREA DEFORMAŢIILOR ŞI DEPLASĂRILOR DE VOLUM
Tab. PRC-T.3.1.5.1.1.1 Deformaţiile structurilor mecanice la solicitări simple
|
Solicitarea |
Schema |
Modelul matematic |
Semnificaţiile parametrilor |
|
|
Scop |
Relaţii de calcul |
|||
|
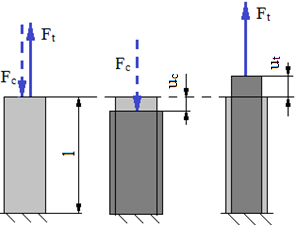
Tracţiune, compresiune |
|
Verificare |
|
Ft,c [N] – forţa de tracţiune, compresiune; At,c [mm2] – aria secţiunii barei solicitată la tracţiune, compresiune; ut,c [mm] – deplasarea (săgeta) axială; uat,c [MPa] – deplasarea (săgeta) axială admisibilă la tracţiune, compresiune; Ft,c cap [N] – forţa de tracţiune, compresiune capabilă din considerente de rigiditate; E [MPa] – modulul de elasticitate longitudinal al materialului; EAt,c [N] – modulul de rigiditate la tracţiune, compresiune |
|
Dimensionare |
|
|||
|
Sarcina capabilă |
|
|||
|
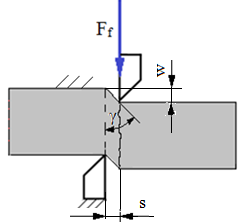
Forfecarea (tăierea) pură |
|
Verificare |
|
Ff [N] – forţa de forfecare; Af [mm2] – aria secţiunii de forfecare; w [mm] – deplasarea (săgeta) de forfecare; waf [mm] – deplasarea (săgeta) de forfecare admisibilă; γ [rad] – rotirea la forfecare;
Ff cap [N] – forţa de forfecare capabilă din considerente de rigiditate;
G [MPa] – modulul de elasticitate transversal al materialului; GAf [N] – modulul de rigiditate la forfecare |
|
Dimensionare |
|
|||
|
Sarcina capabilă |
|
|||
|
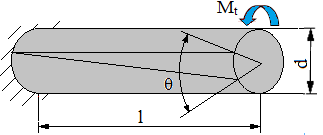
Torsiunea (răsucirea) |
|
Verificare |
|
l [mm] – lungimea barei; Mt [Nmm] – momentul de torsiune (răsucire); Ip [mm4] – momentul de inerţie polar;
θ [rad] – deplasarea unghiulară (rotirea); θa [rad] – deplasarea unghiulară (rotirea) admisibilă; G [MPa] – modulul de elasticitate transversal al materialului; GIp [Nmm2] – modulul de rigiditate la torsiune |
|
Dimensionare |
|
|||
|
Sarcina capabilă |
|
|||
|
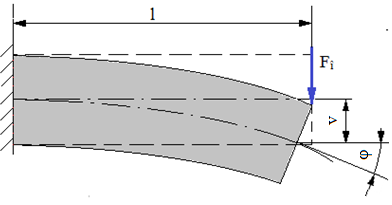
Încovoierea |
|
Verificare |
|
l [mm] – lungimea barei; v [mm] – deplasarea (săgeta) la încovoiere; φ [rad] – rotirea la încovoiere; va [mm] – deplasarea (săgeta) la încovoiere admisibilă; φa [rad] – rotirea la încovoiere admisibilă; Fî [N] – forţa de încovoiere; Iz [mm4] – momentul de inerţie axial;
σaî [MPa] – tensiunea admisibilă de încovoiere;
E [MPa] – modulul de elasticitate longitudinal al materialului; EIz [Nmm2] – modulul de rigiditate la încovoiere
|
|
Dimensionare |
|
|||
|
Sarcina capabilă |
|
|||
|
Obs. Valorile deplasărilor liniare (săgeţilor) şi unghiulare (rotirilor) se determină din condiţiile de funcţionare impuse în norme şi standarde. |
||||