|
Buzdugan I.D.,
Mogan Gh.L. Proiectarea roboților. Universitatea Transilvania din Braşov |
|
Subcap.TR.6.2 Alegerea cuplajului motor-șurub, subansamblul S2 |
|
Aspecte privind
alegerea cuplajului Pentru antrenarea șurubului din componența cuplei elicoidale cu rostogolire (S3) de către motor (S1) se impune alegerea unui cuplaj care se montează pe arborele motorului și tronsonul de cap al șurubului (fig. 1).
Fig. 1 Secvență constructivă a zonei cuplajului flexibil cu disc de antrenare a șurubului Momentul de
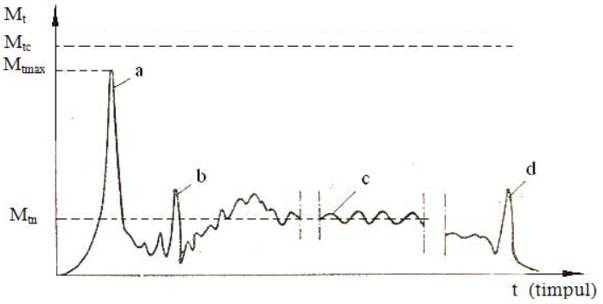
torsiune transmis de un cuplaj (fig.1) are la bază o funcţie variabilă în
timp (fig.2) determinată de condiţiile reale de funcţionare care, în general,
se pot identifica prin următoarele perioade: a –
şocul la pornire determinat de sarcinile inerţiale de demarare
(accelerare); b - trecerea prin zona de
rezonanţă; c – funcţionare continuă în regim
staţionar; d – şocul la oprire determinat de
sarcinile inerţiale de decelerare.
Fig. 2 Variaţia momentului
de torsiune transmis de cuplaj Momentul de
torsiune nominal, Mtn, reprezintă cel mai mare moment mediu
care apare în regim staţionar de funcţionare continuă sau intermitentă. Momentul de
torsiune de calcul (alegere), Mtc, reprezintă
momentul de torsiune teoretic pentru calcule de proiectare care ia în
considerare şi sarcinile suplimentare celei nominale: inerţiale, şocurile,
forţele elastice datorate deformării forţate a elementelor componente ale
cuplajului, forţele de frecare interne dintre elementele mobile componente
ale cuplajului; aceste sarcini, dificil de evaluat cantitativ, se iau în
considere în calcul prin intermediul unui coeficient de siguranţă,
Ks, care se determină pe baza datelor
experimentale ţinând cont de tipul maşinii motoare, a cuplajului,
de tipul şi regimul de funcţionare al maşinii antrenate. Relaţia de calcul a
momentului de torsiune de calcul,
conţine coeficientul,
Ks > 1, dependent de cazurile concrete de funcţionare;
pentru transmisiile roboților se poate adopta, Ks = 1,3...1,6. Obs. Pentru
cazul roboților modulari, Mtn = Mm Pentru transmisiile roboților se adoptă culaje flexibile (fig.3) și cu rigiditate torsională mărită, pentru a asigura montajul fără introducerea de forțe pasive în cazul abaterilor dre la coaxialitate a axelor arborilor legați (fig.3) și, respectiv, pentru a nu induce rotiri nederminate (generate de elasticități torsionale) pe fluxul principal de antrenare a cuplei.
Fig. 3 Abateri de la coaxialitatea arborilor legaţi de cuplaje: a - poziţie de referinţă; b – axială (Δx); c – radială (Δr); d – unghiulară (Δα); e - combinată
Fig. 2 Variaţia momentului
de torsiune transmis de cuplaj Linkuri Cuplaje flexibile
cu disc (discuri) https://www.industry-plaza.com/flexible-coupling-with-mtd-lamellae-p159695.html
Cuplaje flexibile
cu tub gofrate https://www.industry-plaza.com/mbc-flexible-bellows-coupling-p159694.html
Cuplaje flexibile
cu fante radiale (elicoidale)
https://www.industry-plaza.com/flexible-couplings-often-associated-wit-p48741788.html
|