|
Buzdugan I.D.,
Mogan Gh.L. Proiectarea roboților. Universitatea Transilvania din Braşov |
||||||||||||||||||||||
|
Subcap.T.7.2 Alegerea și verificarea
ghidajului |
||||||||||||||||||||||
|
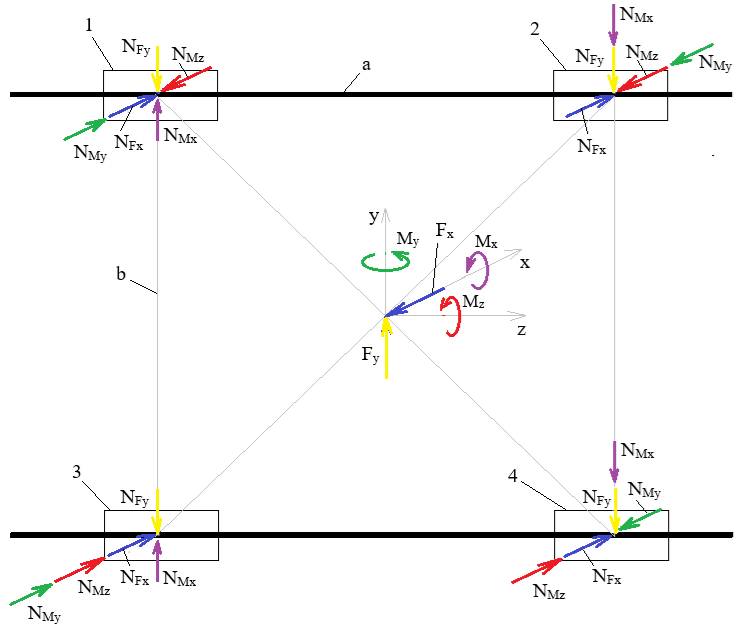
Modele de încărcare a ghidajelor Model de încărcare a ghidajelor cu două coloane și patru bucși de ghidare cu rostogolire
Fig. 1 Model de încărcare a bucșilor de ghidare Torsorul forțelor de reacțiune în centrul cuplei de translație: [+Fy, - Fx, - Mx, + My, -Mz]; semnele și valorile forțelor de reacțiune se obțin în urma modelării în MATLAB. Obs. În cazurile în care forțele de reacțiune au alte sensuri ca cele din fig. 1 se va reface modelul ținând cont de sensurile indicale de MATLAB. Reducerea forțelor
de reacține din centrul
cuplei la nivelul fiecărei bucși de ghidare Ipoteză: având în vedere simetria și neglijând erorile de dispunere (în colțurile unui dreptunghi cu laturile a, b) a bucșelor de ghidare efectul forței/momentului de inerție al torsorului în fiecare bucșă va fi o forță radială în centrul bucșei; sensul se va personaliza pentru fiecare bucșă (fig. 1). Forța de reacțiune, Fx (marcată cu galben), se reduce la forța radială, NFx = Forța de reacțiune, Fy (marcată cu albastru), se reduce la forța radială, NFy = Momentul de reacțiune, Mx (marcat cu maro), din relația de echilibru, Mx
= 2NMx a, se reduce la forța radială, NMx = Momentul de reacțiune, My
(marcat cu verde), din relația de echilibru, My = 2NMy a, se reduce la forța radială, NMy =
Momentul de reacțiune, Mz
(marcat cu roșu),
din relația de echilibru,
Mz = 2NMz b, se reduce la forța radială, NMz = Determinarea forței
de încărcare radială rezultantă pentru fiecare bucșă de ghidare
Identificarea bucșei
celei mai încărcată Bucșa cea mai încărcată radial se va determina din relația, N = max(N1, N2, N3, N4); valoarea N se va utiliza la alegerea bucșei de ghidare. Model de încărcare a ghidajelor cu două rigle și
patru, două sau o unităte (subansamblu) de ghidare cu rostogolire Pentru identificarea
încărcărilor (forţelor şi momentelor), care solicită fiecare subansamblu de ghidare se impune reducerea încărcărilor exterioare, forţe şi momente,
în centrul ghidajului (fig.2).
Fig. 2 Model de reducere a încărcărilor exterioare În cazul general, când încărcarea exterioară a ghidajului, sintetizată în torsorul [Fex Fey Fez Mex Mey Mez], se concentrează în punctul P de coordonate (a,b,c), componentele torsorului forţelor în centrul ghidajului (originea sistemului de coordonate asociat ghidajului; v. fig. 2.) sunt:
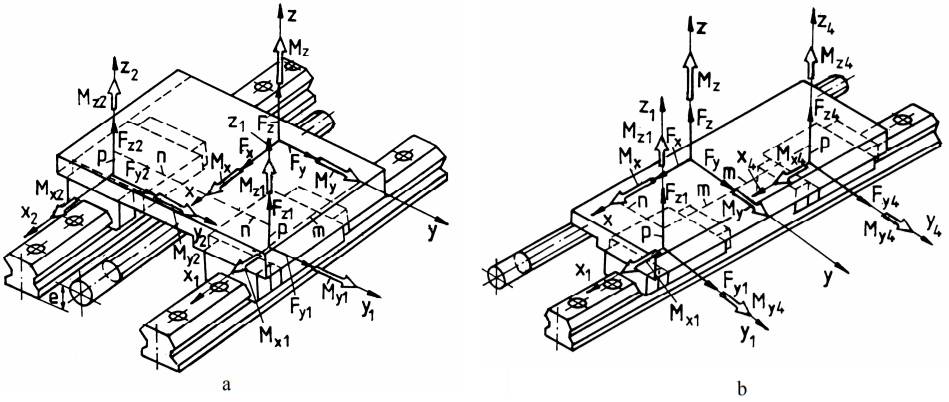
Schemele de calcul (încărcare) a ghidajelor, din punct de vedere constructiv, pot conţine unul (fig.3), două (fig.4,a,b) sau patru (fig.5) subansamble specilizate de ghidare.
Fig. 3 Schema forţelor unui ghidaj cu un subansamblu de ghidare
Fig. 4 Schema forţelor unui ghidaj cu două subansamble de ghidare Pentru identificarea încărcărilor subansamblelor de ghidare se asociază acestora câte un sistem de coordonate local cu axele paralele cu ale sistemului de coordonate asociat ghidajului, la distanţele m, n şi p (fig.3, 4). Forţele şi momentele care încarcă subansamblele de ghidare, pentru generalizare, se consideră în sensurile pozitive ale axelor locale. Pe de altă parte, se consideră construcţia şi montajele ghidajelor din modelele de calcul adoptate ca fiind ideale, fără abateri de execuţie şi de montaj. Ecuaţiile de echilibru ale forţelor şi momentelor, după axele asociate constrângeriilor induse de ghidaj sunt:
pentru ghidajul cu un subansamblu de ghidare (fig.3);
pentru ghidajul cu două subansamble de ghidare dispuse transversal (fig 4,a);
pentru ghidajul cu două subansamble de ghidare dispuse longitudinal (fig.4,b). Din sistemele formate din ecuaţiile de echilibru ale forţelor de mai sus, rezultă expresiile forţelor de reacţiune din subansamblele de ghidare:
pentru ghidajul cu un subansamblu de ghidare (fig.3);
pentru ghidajul cu două subansamble de ghidare dispuse transversal (fig.4,a), considerându-se, în plus, şi relaţiile Fy1 = Fy2, Fz1 = Fz2, My1 = My2, Mz1 = Mz2, Mx1 = Mx2, rezultate din ipoteza simetriei de încărcare ideală;
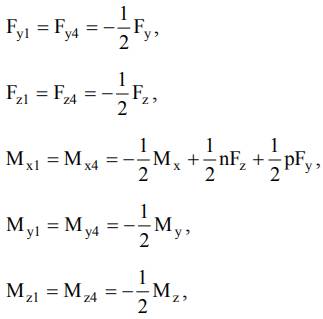
pentru ghidajul cu două subansamble de ghidare dispuse longitudinal (fig.4,b), considerându-se, în plus, şi relaţiile Fy1 = Fy4, Fz1 = Fz4, My1 = My4, Mz1 = Mz4, Mx1 = Mx4, rezultate din ipoteza simetriei de încărcare ideală.
Fig. 5 Schema forţelor unui ghidaj cu patru subansamble de ghidare Pentru schema de calcul din fig. 5, din cauza gradului mărit de nedeterminare, se consideră că forţele torsorului de încărcare se împart egal pentru cele patru subansamble de ghidare (fiecărui subansamblu de ghidare îi revine câte o pătrime din forţele torsorului de încărcare) şi astfel, aplicând suprapunerea de efecte, se obţin forţele de reacţiune:
Ghidajele cu rostogolire au frecări reduse şi cvasiconstante la pornire şi în timpul mişcării. Forţele de frecare din subansamblele de ghidare sunt dependente de tipul ghidajului, vâscozitatea lubrifiantului, sarcina aplicată, viteza de funcţionare şi precizia de montaj. Valorile medii ale forţelor de frecare se pot determina cu realţia, Ff = μePm + F1, în care: μe este coeficientul de frecare de alunecare echivalent, Pm - forţa normală la dirercţia ghidajului, F1 - forţa de rezistenţă internă (frecarea din etanşări, din căile de recirculare etc.) a subansamblului de ghidare. Valorile parametrilor μe, F1 sunt caracteristice fiecărui tip de subansamblu de ghidare şi, de obicei, sunt indicate de producătorul acestora. Forme şi cauze ale scoaterii din uz a subansamblelor de ghidare Principalele cauze ale scoaterii din uz a subansamblelor de ghidare, precum şi formele de manifestare asociate, sunt prezentate în continuare. Oboseala straturilor superficiale ale căilor de rulare şi ale corpurilor de rostogolire (pitting-ul) este cauza principală a scoaterii din uz a subansablelor de ghidare cu rostogolire ce funcţionează la viteze mărite, unse abundent şi bine etanşate. În aceste situaţii, în zonele de contact, după un număr mărit de contacte, apar microfisuri de oboseală, care consecinţă a presiunilor hidrostatice mărite din lubrifiant conduc la desprinderi de mici particule de material şi deci la deteriorarea suprafeţelor active şi implicit la înrăutăţirea funcţionării (apariţia de vibraţii şi zgomote). Evitarea acestei deteriorări şi deci realizarea funcţionării corespunzătoare într-o perioadă de timp impusă implică calculul de durabilitate a subansamblului de ghidare, ţinând cont de capacitatea dinamică de încărcare. Deformarea plastică a suprafeţelor active apare când subansamblele de ghidare sunt puternic solicitate, la viteze mult micşorate sau în repaus, şi ungerea este insuficientă. Astfel, pe căile de rulare sau suprafeţele corpurilor de rostogolire pot apărea mici amprente, datorită depăşirii locale a limitei de curgere a materialului, consecinţă apariţiei unor presiuni de contact mult mărite. Evitarea acestei deteriorări, la subansamblele de ghidare, se face prin calculul static, care are la bază capacitatea statică de încărcare. Griparea apare în cazul subansamblelor de ghidare rapide, puternic încărcate şi unse insuficient, sub forma unor zgârieturi pe căile de rulare şi/sau pe suprafeţele active ale corpurilor de rostogolire, consecinţă a unor microsuduri repetate în punctele de contact. Evitarea acestor deteriorări se realizează prin exploatarea şi întreţinerea corespunzătoare a subansamblului de ghidare. Uzarea abrazivă apare cu precădere datorită prezenţei unor impurităţi în zonele active, consecinţă a ineficienţei sistemului de etanşare, şi se manifestă prin zgârieturi pe suprafeţele active, ca urmare a aşchierilor produse de aceste impurităţi. Distrugerea elementelor subansamblului prin rupere, de obicei accidentală, conduce la scoaterea din uz a acestuia. Există posibilitatea ruperii elementelor de poziţionare (colivii) sau a celor de recirculare a corpurilor de rostogolire, consecinţă a apariţiei de uzări şi jocuri mărite, ce conduc la posibilitatea blocării acestora. Calculul de durabilitate Durata de funcţionre a unui subansamblu de ghidare se defineşte ca fiind lungimea totală de deplasare, exprimată în km, sau fiind timpul total de funcţionare, în ore, realizat de ghidaj până la apariţia primelor semne de oboseală a materialului, pe căile de rulare sau pe suprafeţele active ale corpurilor de rostogolire. Durabilitatea de bază a unui subansamblu de ghidare este durata de funcţionare atinsă de 90% din subansamblele unui lot, încercate independent, în aceleaşi condiţii. Relaţia de calcul a durabilităţii, exprimată în km, este
în care lr este lungimea totală (în km) de deplasare de referinţă (50, pentru ghidajele cu bile sau 100 pentru cele cu role), C – capacitatea (sarcina) dinamică de bază; Pm – sarcina echivalentă (medie); p – exponentul durabilităţii cu valoarea 3, pentru subansamblele de ghidare cu bile, sau 10/3, pentru cele cu role. Pentru cazurile când durabilitatea se exprimă în ore, se poate folosi relaţia,
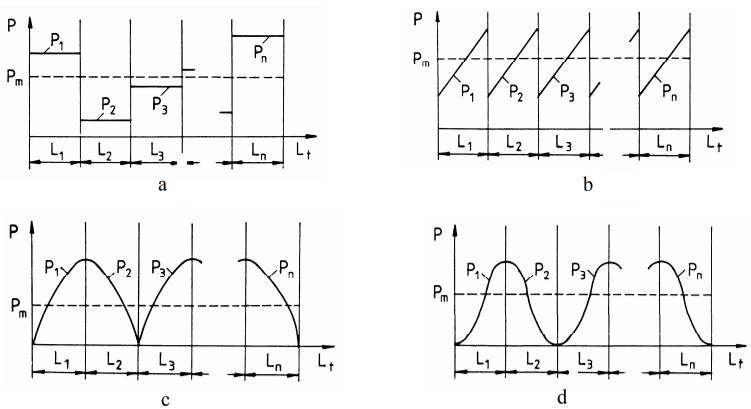
în care: lc este lungimea cursei ghidajului exprimată în metri şi n – numărul de curse duble (dute-vino) realizate într-un minut. Capacitatea dinamică de bază este sarcina care solicită subansamblul de ghidare asigurând durabilitatea egală cu lungimea de referinţă. Valoarea acestui parametru, de obicei, se ia din cataloagele firmelor producătoare. Sarcina care solicită subansamblul de ghidare, de obicei, este variabilă de-a lungul cursei, fiind dependentă de forţele de reacţiune induse de subansamblul susţinut, viteza şi poziţia acestuia în spaţiu. Sarcina echivalentă (medie) este dată de încărcarea (forţă sau moment), presupusă ca fiind constantă, care solicită subanasamblul de ghidare după una din direcţiile forţelor de reacţiune şi conduce la aceeaşi durabilitate ca în cazul încărcării cu sarcină variabilă. Deoarece identificarea variaţiei reale a încărcării este dificilă, echivalarea regimurilor de solicitare reale cu regimuri teoretice şi mai departe acestea cu un regim echivalent cu încărcare constantă, se poate face prin intermediul unor modelele simplificate, prezentate în continuare. Modelul variaţiei în trepte, aplicabil în cazul ghidajelor cu încărcări cvasiconstante pe lungimi de cursă diferite (fig. 5,a), presupune pentru calculul sarcinii echivalente, relaţia,
în care, unde T reprezintă timpul de deplasare pe cursa totală, ti - timpii de deplasare pe diversele tronsoane, Lt - lungimea totală de lucru, Pi – încărcări parțiale corespunzătoare lungimilor Li ale tronsoanelor.
Fig. 5 Modele de echivalare a încărcării Modelul variaţiei liniare în salturi (fig.5,b), aplicabil pentru situaţiile când sarcina pe domeniul cursei de lucru este variabilă crescător, cu discontinuităţi bruşte, conduce la sarcina echivalentă, dată de relaţia,
unde, Pmin = min(P1, … Pn), Pmax = max(P1, … Pn). Modelul variaţiei sinusoidale consideră că încărcarea reală, aproximabilă cu arce de sinusoidă (fig.5,c), se echivalează cu sarcina Pm = 0,65Pmax, unde, Pmax = max(P1, … Pn). Modelul variaţiei parabolice ia în considerare aproximarea variaţiei încărcării exterioare după o lege care are la bază arce de parabolă de ordinul doi, (fig.5,d), şi face echivalenţa cu relaţia, Pm = 0,75Pmax, unde, Pmax = max(P1, … Pn). Pentru calcule de verificare, durabilitatea de bază se multiplică cu factori de corecţie dependenţi de duritatea căilor de rulare, temperatura de lucru, direcţia de orientare a încărcării exterioare etc., cuantificându-se astfel diferenţa dintre condiţiile reale de funcţionare şi cele de testare în vederea determinării durabilităţii. Valorile acestor factori, de obicei, sunt indicate în cataloagele firmelor producătoare de subansamble de ghidare. Algoritmul de alegere și verificare a unui ghidaj Considerându-se ca date de intrare (lista de cerinţe): sarcina exterioară, cursa maximă, durata de funcţionare (în ore) sau distanţa parcursă (în km), frecvenţa de deplasare, viteza maximă, acceleraţia maximă, precizia, rigiditatea, randamentul minim, masa admisibilă, gabaritul disponibil etc., algoritmul de alegere și verificare a unui ghidaj, folosind subansamble de ghidare specializate, poate avea următoarele etape: A. Adoptarea schemei ghidajului (v. fig.2, 3, 4) este o etapă complexă fără modele matematice la bază şi presupune cunoaşterea caracteristicilor şi particularităţilor funcţionale, constructive şi de montaj ale ghidajelor din diverse aplicaţii practice Pentru cazul sistemelor mecanice ale produselor mecatronice, în special pentru roboţii industriali, se adoptă variante care în cazul structurilor mecanice suspendate, în plus, asigură gabarite şi mase micşorate. B. Determinarea torsorului forţelor de reacțiune care încarcă ghidajul, pornind de la încărcările exterioare, cu relaţiile de mai sus, având la bază modelul din fig.1 sau rezultatele analizei dinamie cu MatLab. C. Determinarea încărcărilor subansamblelor de ghidare, pornind de la torsorul încărcării ghidajului, se face cu relaţiile de mai sus pentru cazurile prezentate. În unele situaţii practice, având în vedere gradul de nedeterminare mărit, se întocmesc modele de analiză cu elemente finite pentru determinarea încărcărilor subansamblelor de ghidare. D. Alegerea subansamblelor de ghidare componente ale ghidajului adoptat, având în vedere multitudinea de soluţii constructive oferite de firmele specializate, este de asemenea o etapă complexă, care presupune cunoaşterea în detaliu a performanţelor şi caracteristicilor diverselor subansamble de ghidare (v. exemplele prezentate în acest capitol), pe de-o parte şi a specificităţilor produsului în care acestea sunt incluse, pe de altă parte. Pentru roboţii industriali urmărind caracteristicile impuse de produsele mecatronice, de obicei, se adoptă subansamble de ghidare cu bile pentru structurile suspendate (Anexa PT.3) şi cu role pentru structurile de susţinere (de bază) (Anexa PT.4). Subansamblele de ghidare cu role recirculabile se remarcă prin performanţe mărite de precizie, portanţă, rigiditate, absenţa mişcărilor de stick-slip, frecare constantă la un nivel ridicat de invarianţă cu viteza. Pornind de la tipul subansamblului de ghidare adoptat, ţinând cont de ofertele diverşilor producători şi de încărcările impuse, se alege mărimea şi se identifică parametrii geometrici şi caracteristicile. E. Verificarea subansamblelor de ghidare la durabilitate se face având la bază inecuaţia, Ld,h ≤ Ld,h imp , în care Ld,h sunt durabilitaea subansamblului de ghidare ales în km, respectiv în ore, calculată cu relaţiile de mai sus; Ld,h imp – durabilitatea impusă, de asemenea, în km, respectiv în ore. Pentru calculele de verificare, ţinând cont de încărcările şi condiţiile de lucru reale, se fac corecţii prin intermediul unor factori, de obicei, cu valorile indicate de producător în cataloage. De exemplu, pentru ghidajele cu bile de tip bucşă (Anexa PT.3) se corectează capacitatea dinamică de bază. F. Alegerea sistemului de pretensionare se face ţinând cont de aplicaţie, de posibilităţile de acces, de tipurile subansamblelor de ghidare folosite etc. G. Adoptarea sistemelor de etanşare şi protecţie ţinând cont de mediul şi condiţiile de lucru Linkuri https://www.youtube.com/watch?v=wsS7ifd-Gpo |
||||||||||||||||||||||