|
Buzdugan I.D.,
Mogan Gh.L. Proiectarea roboților. Universitatea Transilvania din Braşov |
||||||||
|
Subcap.2.1.2 Scheme funcționale,
sisteme de coordonate și spații de lucru (operare) |
||||||||
|
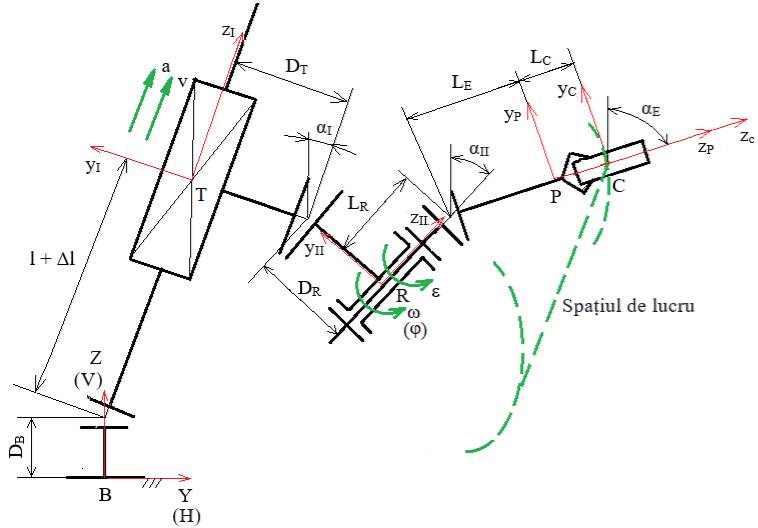
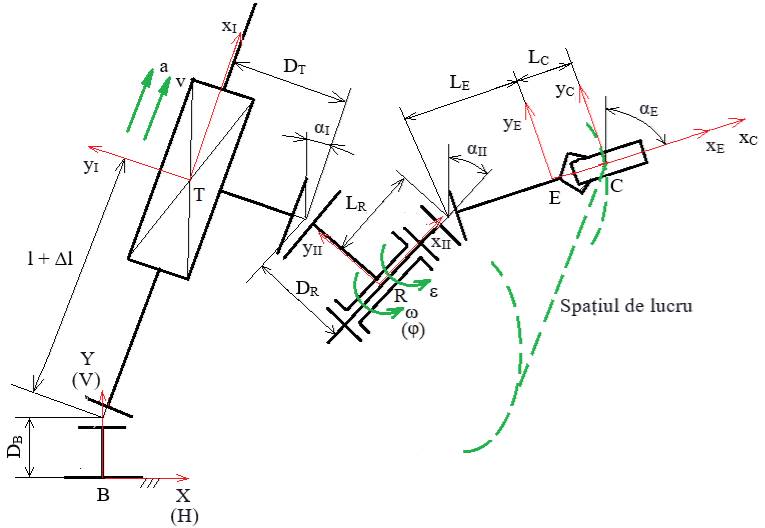
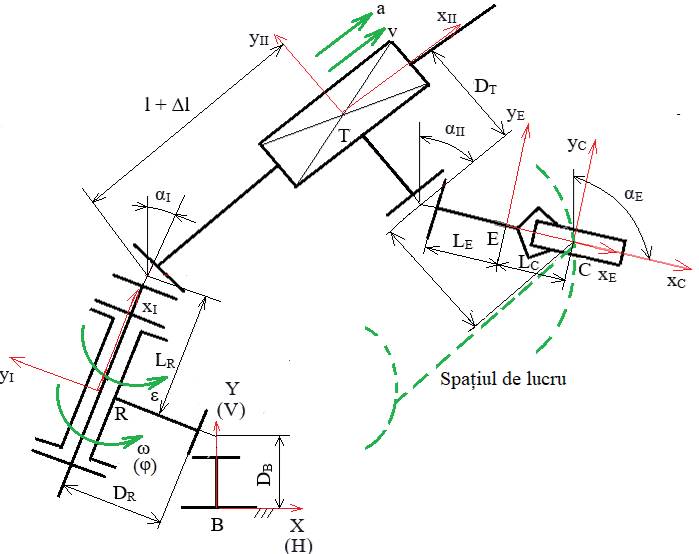
Scheme funcționale generale și
sisteme de coordonate Varianta: V-TR
Varianta: V-RT
Semnificațiile notațiilor: Y(H)
– axa orizontală, Z (V) – axa verticală; R – cuplă de rotație, T – cuplă de
translație, B – element de bază, P – prehensor, C – corpul (obiectul de
manipulat); zI – axa z a modulului I, yI – axa y a modulului I; zII – axa z a modulului II, yII – axa y a modulului
II; zP – axa z
asociată prehensorului, zC
– axa z asociată corpului (obiectului), yP – axa y asociată prehensorului; yC – axa y corpului (obiectului); l, v, a - cursa, viteza, accelerația modulului
de Translație; φ, ω,
ε - unghiul, viteza unghiulară,
accelerația unghiulară a
modulului de Rotație; αI, αII, αE – unghiurile
raportate la axa verticală (V) ale modulului MI, modulului MII,
respectiv, prehensorului P; DB, DT, DR, LR,
LE, LC – dimensiuni care se vor stabili la modelarea în
CATIA.
Obs. Axele
z ale sistemelor de coordonate sun perpendiculare pe planul schemelor. Spațiul
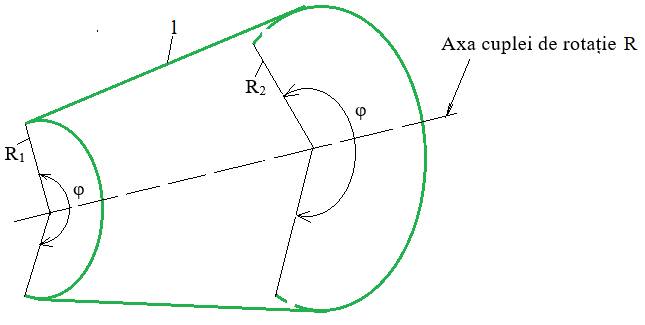
de lucru Ținând
cont de mișcările cuplelor și de valorile curselor l, pentru cupla
de T, și φ, pentru cupla de roratie R, spațiul de lucru are
forma unui sector de suprafață tronconică cu dimensiunile l = …
(cursa cuplei T), φ = … (cursa
cuplei R), R1 = ..., R2 = ..., (valorile acestor raze
se vor determina pentru fiecare caz particular în parte).
Exemple
|