|
Buzdugan I.D.,
Mogan Gh.L. Proiectarea roboților. Universitatea Transilvania din Braşov |
||||||||||||||||||||||||
|
Subcap.2.1.1 Scheme cinematice (funcționale)
și structural funcțional-constructive |
||||||||||||||||||||||||
|
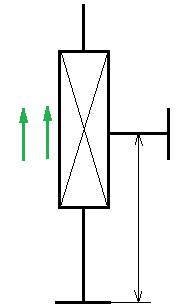
Scheme
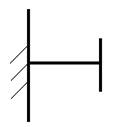
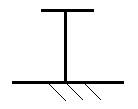
structurale componente și orientări posibile (H – orizontal; V – vertical): Baza
(B)
Cupla
de Translație (T)
Cupla
de Rotație (R)
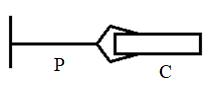
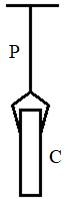
Efector
E (Prehensor (P) și corp de
manipulat (C)
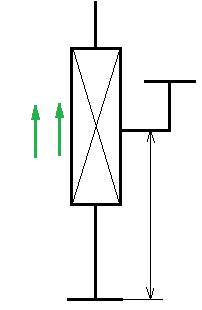
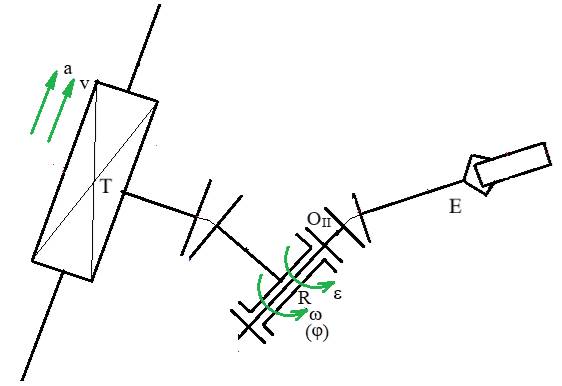
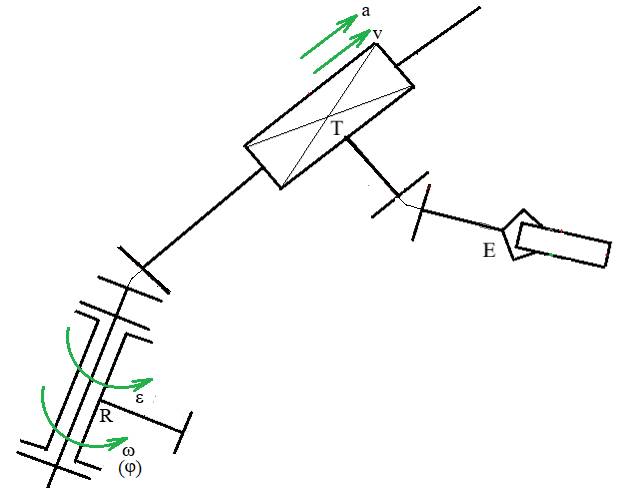
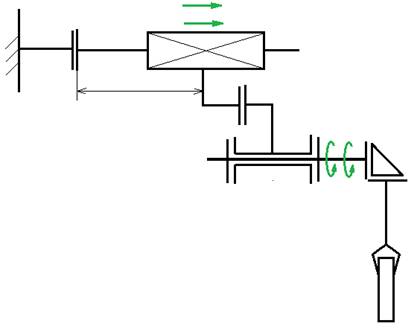
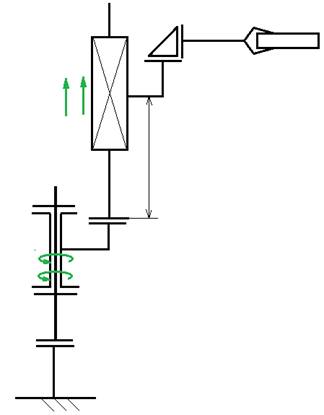
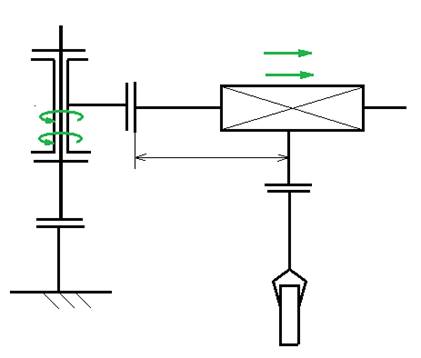
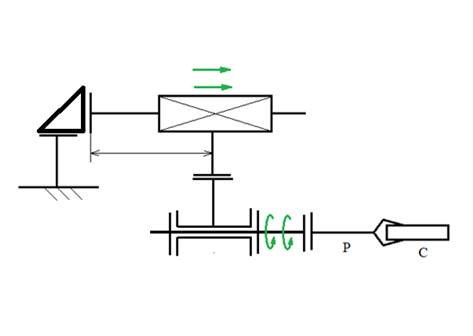
Scheme cinematice( funcționale) generale Varianta TR
Varianta RT
Exemple
scheme funcționale particulare
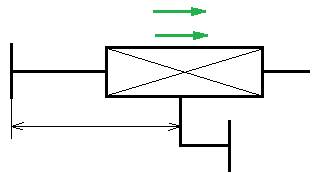
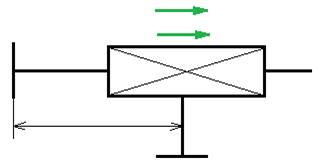
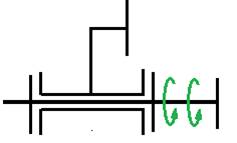
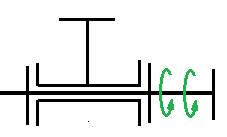
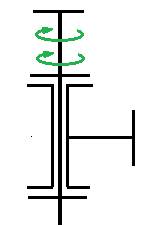
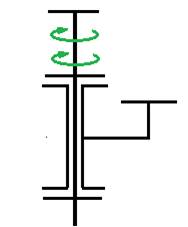
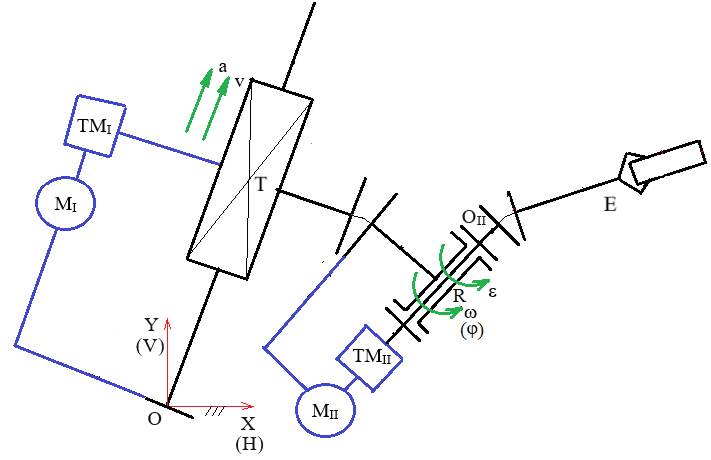
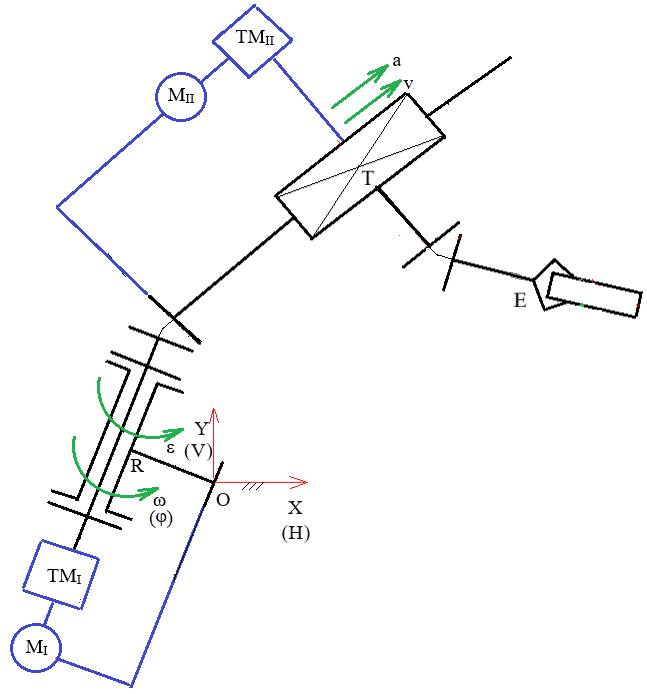
Scheme structural funcțional-constructive
Varianta RT
Semnificațiile notațiilor: MI
MII - motorul
modulului I, respectiv II; TMI, TMII - Transmise Mecanică a modulului I, respectiv, II |