|
Buzdugan I.D., Mogan
Gh.L. Proiectarea roboților ficși. Universitatea Transilvania din Braşov |
|
Anexa.7.1 Aspecte
generale privind ghidajele modulelor de translație ale roboților |
|
Lagăre de translaţie (ghidaje) cu rostogolire Subansamblele care
materializează cuplele cinematice de translaţie sunt frecvent numite
ghidaje. Acestea, pe lângă faptul că asigură deplasarea relativă de
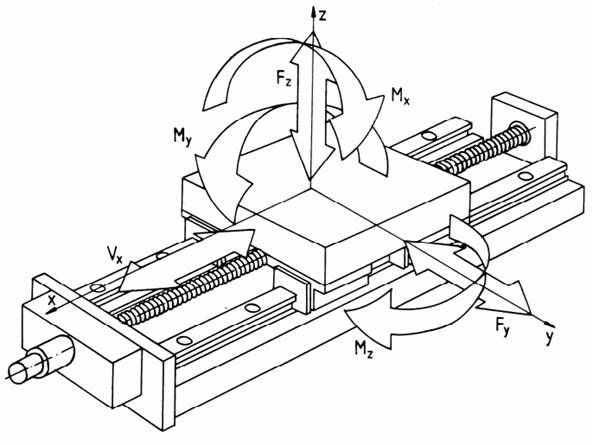
translaţie cu viteza vx (fig.1) a saniei în raport cu baza, au şi
rolul de a prelua şi torsorul forţelor de reacţiune [0 Fy Fz Mx My Mz].
Fig.
1 Mişcarea şi forţele de reacţiune dintr-un ghidaj Determinante pentru
corecta funcţionare a sistemelor din care fac parte şi, în special, pentru
precizia de funcţionare a acestora, ghidajele trebuie să îndeplinească
următoarele condiţii: - poziţiile spaţiale ale suprafeţelor active (căilor de rulare) care formează cupla cinematică trebuie astfel alese încât reacţiunile să fie minime; - forma, dimensiunile suprafeţelor de contact şi condiţiile funcţionale trebuie să asigure distribuţii ale presiunilor de contact cât mai apropiate de cea uniformă şi evident fără depăşirea presiunilor admisibile; - deformaţiile elementelor care formează ghidajele trebuie să rămână în limite admise, impuse, în special, de precizia de funcţionare; - rezistenţa mărită la uzare a materialelor folosite, pentru a se asigura menţinerea îndelungată a preciziei de funcţionare şi pentru a se evita recondiţionări frecvente; - construcţia trebuie să permită reglarea jocului dintre elementele în mişcare relativă, precum şi compensarea uzurilor suprafeţelor active; - sistemul de ungere trebuie să asigure condiţii de ungere invariante de poziţia suprafeţelor active în spaţiu. Construcţia ghidajelor cu rostogolire Luând în considerare
particularităţile geometrico-constructive din zonele active în care apar
mişcările relative, soluţiile constructive ale ghidajelor cu rostogolire se
diferenţiază prin tipul corpurilor de rostogolire, care pot fi bile
(fig.2,a,b,c,d) sau role cilindrice (fig.2,e,f), prin tipul contactelor
neconforme dintre căile de rulare şi corpurile de rostogolire, care pot fi punctiforme
(fig.2,a,b,d) sau după o linie (fig.2,c,e,f) - pentru sarcini mărite - şi
prin existenţa (fig.2,a,f) sau inexistenţa (fig.2,b,c,d) coliviei de ghidare
a corpurilor de rostogolire.
Fig.
2 Tipuri de corpuri de rostogolire şi contacte mecanice După modul de deplasare
a corpurilor de rostogolire, ghidajele pot fi cu recircularea (fig.3,d) sau
fără recircularea acestora (fig.3,a,b,c). Ghidajele fără recirculare se pot
întâlni în varianta constructivă cu fixarea setului de corpuri de rostogolire
la calea de rulare scurtă (fig.3,a) sau la cea de lungime mare (fig.3,b) şi
fără fixarea acestuia (fig.3,c). Varianta din fig. 3,a, în care corpurile de
rostogolire rămân tot timpul în contact cu căile de rulare, prezintă
dezavantajele durabilităţii scăzute, frecarilor mărite şi dificultăţilor de
protejare la impurităţi. Soluţia din fig.3,b spre deosebire de cea din
fig.3,a, implică un număr mai mare de corpuri de rostogolire, care nu sunt
încărcate permanent. În cazul din fig.3,c căile de rulare sunt cvasiegale ca
lungime, dar mai lungi decât cursa de realizat, colivia cu corpurile de rostogolire
- liberă între cele două subansamble - este mai scurtă având, în timpul
funcţionării, poziţie variabilă şi conducând la frecări, cu precădere de
rostogolire, mult micşorate faţă de variantele precedente în care apar şi
fercări de alunecare semnificative.
Fig.
3 Posibilităţi de mişcare a corpurilor de rostogolire Soluţiile constructive
cu recircularea corpurilor de rostogolire (fig.3,d), prin canale adecvate,
asigură frecările cele mai mici şi prin construcţia modulată sunt mult mai
versatile şi larg utilizate în construcţia subsistemelor mecanice ale
produselor mecatronice. Ghidajele cu recircularea corpurilor de rostogolire
se folosesc cu precădere pentru curse mari, iar în cazul curselor mici se pot
folosi ghidaje fără recirculare, dacă sunt acceptabile dezavantajele
acestora, menţionate mai sus. Din punctul de vedere al
posibilităţilor de pretensionare (preîncărcare) ghidajele cu rostogolire pot
fi deschise (fig.4, fără preîncărcare, corpurile de rostogolire fiind
menţinute în contact cu căile de rulare de greutăţile subansamblului
superior, solidarizat cu sarcina. Aceste ghidaje pot fi folosite pentru
deplasări orizontale când sarcinile şi inerţiile de încărcare apasă permanent
în direcţie verticală de sus în jos. Proiectarea constructivă de ansamblu a
unui ghidaj presupune adoptarea unuia sau a mai multor subansamble de ghidare
capabile să preia forţele torsorului reacţiunilor. Astfel, pentru ghidajul
din fig.4 s-a adoptat subansamblul de ghidare 1, pentru preluarea forţelor cu
direcţia paralelă cu axa z şi subansamblul 2, pentru forţele paralele cu
axele y şi z, în plus, ţinînd cont şi de poziţia celor două subansamble de
ghidare, ghidajul preia şi momentele rezistente ale torsorului.
Fig.
4 Ghidaje deschise Deoarece subansamblele
de ghidare sunt compuse din piese care implică condiţii severe de precizie
dimensională şi calitatea suprafeţei, prelucrarea se realizează cu tehnologii
şi maşini unelte specifice, în întreprinderi specializate. Ghidajele închise
(fig.5) au soluţii constructive care dau posibilitatea de pretensionare
(preîncărcare sau încărcare iniţială), cu forţe prescrise de producător,
pentru anularea jocurilor, compensarea uzurilor, mărirea rigidităţii şi
pentru lărgirea domeniilor de utilizare, pentru orice poziţie în spaţiu şi
încărcări în toate direcţiile.
Fig.5
Ghidaje închise Deoarece valorile,
direcţiile şi sensurile forţelor care solicită structura unui robot sunt în
continuă schimbare, ghidajele cu rostogolire deschise sunt rar utilizate.
Acestea se pot întâlni doar în construcţia roboţilor în coordonate carteziene
pentru ghidajele cu mişcări orizontale şi încărcările pe direcţie verticală
de sus în jos. În cazul celorlalte situaţii frecvent întâlnite în
funcţionarea roboţilor industriali se utilizează cu precădere ghidaje cu
rostogolire pretensionate. Pretensionarea
ghidajelor închise potate fi externă (v. fig.5), prin reglare la
montarea subansamblelor de ghidare în cadrul ghidajului, sau internă (Anexa
PT.4), realizată la montarea subansamblului de
ghidare în cadrul firmei producătoare. Din diversitatea de
soluţii constructive de ghidaje integrate sau de subansamble de ghidare, în
continuare, se vor prezenta câteva produse, cu aplicabilitate în construcţia
roboţilor industriali sau a sistemelor de perirobotică. Ghidajele cu bile
recirculabile sub formă de bucşă sunt folosite în aplicaţii de poziţionare
precisă fiind caracterizate de rigiditate mărită. Bucşele cu bile din fig.6
pot fi închise, varianta KB sau cu fantă de grosime g, varianta KBS,
şi deschise, varianta KBO (Anexa PT.3). În
cazul bucşelor cu bile cu fantă şi deschise pretensionarea se realizează
datorită strângerii elastice a corpului metalic al bucşei împreună cu
seturile de corpuri de rostogolire pe coloana de ghidare.
Fig. 5 Bucși
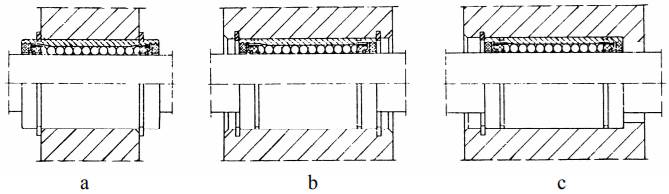
cu bile recirculabile Fixarea axială a
bucşelor cu bile de ghidare în subansamblul lagărului se poate face cu inele
elastice la exterior (fig.6,a) sau la interior (fig.6,b) şi prin umăr şi inel
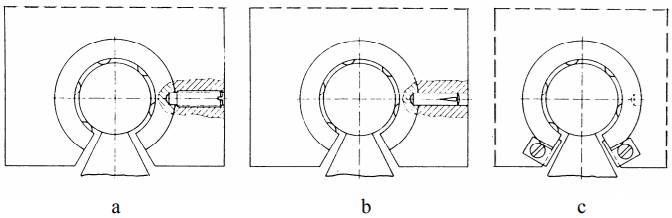
elastic (fig.6,c). Spre deosebire de bucşele cu bile recirculabile închise,
la care se impune numai fixarea axială a corpului bucşei, în cazul bucşelor
cu bile recirculabile deschise, este necesară şi anularea rotirii acestora,
utilizând un ştift filetat (fig.7,a), un ştift cilindric crestat (fig.7,b)
sau limitatoare (fig.7,c).
Fig.6
Fixarea axială a bucşelor cu bile închise
Fig.
7 Fixarea axială a bucşelor cu bile deschise Subansamblele de ghidare
prezentate în fig.8 conţin bucşele de ghidare prezentate în fig.5 care, în
plus, sunt fixate într-un corp de susţinere monobloc cu talpă varianta KGB,
pentru bucşele cu bile recirculabile închise şi varianta KGBO, pentru bucşele
cu bile recirculabile deschise, sau întrun corp de susţinere din două bucăţi
varianta KGBS, pentru bucşele cu bile recirculabile cu fantă (Anexa PT.3).
Fig. 9 Subansamble
cu bucși bile recirculanie deschise montate într-un corp de
susținere Linkuri |