|
Buzdugan I.D., Mogan
Gh.L. Proiectarea roboților ficși. Universitatea Transilvania din Braşov |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Anexa.3.1.1 Aspecte generale
despre prehensoare |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Tipuri
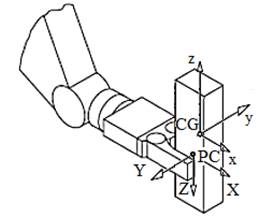
și caracteristici ale prehensoarelor Studiile privind prehensiunea unui obiect se realizează asociind obiectului de manipulat un sistem de coordonate cartezian drept (xzy), de obicei, cu centrul în centrul de greutate (CG) al acestuia (fig. 1,a). Sistemul de coordonate (XYZ) asociat punctului caracteristic (PC) al dispozitivului de prehensiune se consideră ca sistem de referinţă în vederea stabilirii poziţiei şi orientării obiectului de prehensat.
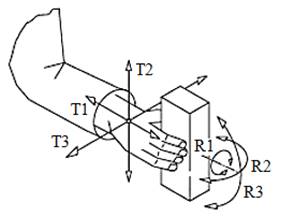
a b Fig. 1 Poziţionarea şi mobilităţile obiectuluiprehensat: a – cu prehensor cu două bacuri; b – mişcări posibile Tab. 4.1 Clasificarea dispozitivelor de prehensiune
Prehensiunea cu mâini mecanice se poate realiza în configuraţii diferite,de obicei, concepute după forma obiectului (paralelipipedică, sferică, cilindrică etc.). Numărul de bacuri (degete) se adoptă în funcție de tipul suprafețelor obiectului manipulat și de modul specific de prindere: axială, radială, oblică, laterală etc.
Tab.1 Caracteristicile proceselor şi dispozitivelor de
prehensiune
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||