|
Buzdugan I.D., Mogan
Gh.L. Proiectarea roboților ficși. Universitatea Transilvania din Braşov |
|
Anexa.1.1.2 Structura și
funcționarea roboților ficși |
|
Structura
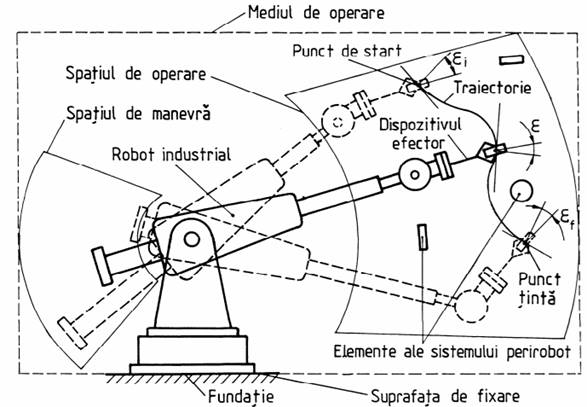
generală a sistemului robot În oricare situaţie de utilizare a unui robot industrial se impune parcurgerea unui set de traiectorii între punctele de start şi ţintă din spaţiul de operare (fig.1), pentru poziţionarea şi orientarea controlată a obiectului de manipulat în mediul tehnologic (de operare).
Fig. 1 - Structura sistemului robotului industrial
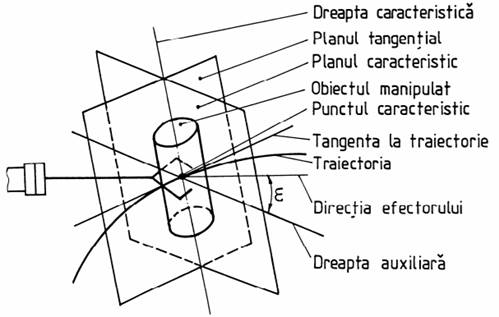
Fig. 2 - Geometria orientării corpului manipulat Obiectul manipulat poate fi un semifabricat/piesă, care este adus pentru a fi prelucrat/asamblat sau respectiv evacuat după prelucrare, sau o sculă/dispozitiv de lucru sau de inspecţie (pistol de vopsire, cap de sudare, dispozitiv de înşurubare, polizor de debavurare, aparat/instrument de măsură etc.). Obiectul manipulat, conform succesiunii tehnologice, se poate găsi în staţionare, cu sau fără acţiune tehnologică, sau în mişcare pe traiectorii definite. Pentru descrierea sintetică a poziţiei şi orientării obiectului manipulat cu viteze şi acceleraţii impuse în cadrul mişcării generale, acesta se reduce la un punct caracteristic şi o dreaptă caracteristică (fig. 2). De obicei, se adoptă ca dreaptă caracteristică, dacă există, una din axele de simetrie ale obiectului de manipulat şi ca punct caracteristic centrul de simetrie (când sunt mai multe axe de simetrie), un punct de pe axa de simetrie (când există o singură axă de simetrie) sau centrul de masă. Traiectoria (fig.1 şi 2), ca o secvenţă distinctă asociată unei faze tehnologice, ţinând cont de poziţia obstacolelor (elemente ale sistemului perirobot), este locul geometric al poziţiilor succesive ale punctului caracteristic, în mişcare. Orientarea obiectului manipulat în punctele curente ale traiectoriei se descrie de poziţia direcţiei planului tangenţial, format de dreapta caracteristică şi tangenta la traiectorie, prin unghiul de orientare (operare, de lucru) ε, dintre normala la acest plan (dreapla auxiliară) şi direcţia efectorului robotului. Planul determinat de dreaptele caracteristică şi auxiliară se numeşte plan caracteristic. Mulţimea punctelor din mediul de operare al unui robot industrial (fig.1) care pot fi atinse de punctele caracteristice ale obiectelor de manipulat, formează spaţiul de operare (de lucru). Pe de altă parte, mulţimea punctelor din mediul de operare atinse de punctele extreme ale robotului industrial formează spaţiul de manevră. Suprafaţa de fixare a unui robot industrial este suprafaţa de legătură a bazei cu fundaţia, faţă de care se defineşte şi sistemul de coordonate fix asociat robotului industrial. Structura
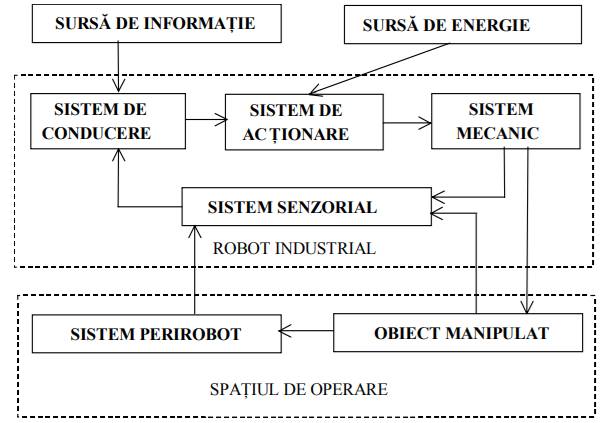
funcţională a roboţilor industriali Roboţii
industriali pot fi consideraţi ca hipersisteme mecatronice complexe (fig.3),
compuse din următoarele părţi principale: -
sistemul mecanic,
care realizează mişcarea dorită a obiectului manipulat prin acţionare în sau
asupra mediului de operare; -
sistemul de acţionare cu
funcţia de a pune în mişcare cuplele cinematice ale sistemului mecanic prin
intermediul unor subsisteme de antrenare cu motoare legate la sursa de
energie; -
sistemul senzorial prin
care se culeg informaţii privind valorile parametrilor interni care descriu
starea sistemului robotului industrial, precum şi valorile parametrilor
externi asociaţi spaţiului de operare şi/sau sistemului perirobot; -
sistemul de conducere
procesează informaţiile primite de la sursa de informaţie (operatorul uman,
sisteme de conducere similare şi superioare) şi/sau de la sistemul senzorial.
Fig. 3 - Sistemele unui robot industrial Sistemele mecanice ale
roboţilor industriali Mişcarea
punctului caracteristic, asociat unui obiect manipulat, pe traiectorie între
două puncte succesive de pe aceasta, se poate descompune în două secvenţe: -
poziţionarea în
punctul al doilea, fără modificarea orientării; -
orientarea,
care presupune rotirea în jurul punctului caracteristic, considerat fix. Deci, pornind de la
funcţia principală de manipulare (poziţionare şi orientare) a unui obiect
într-un spaţiu de operare dat, sistemul mecanic se compune din următoarele
părţi principale: mecanismul de poziționare, mecanismul de orientare
dispozitivul de prehensiune (efector) (fig. 4).
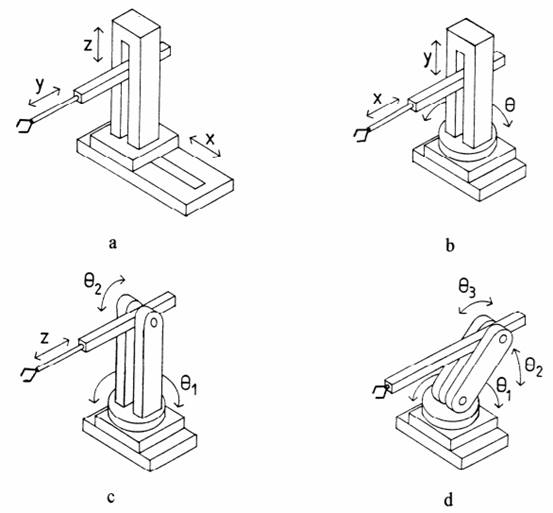
Fig. 4 - Structura sistemului mecanic a unui robot fix serie Pentru ghidarea completă a dispozitivului efector cu obiectul manipulat în spaţiul de operare tridimensional, fără obstacole, sunt necesare minumum şase grade de libertate (mişcări independente) ale acestuia, dintre care trei sunt de poziţionare (generatoare de traiectorie) şi celelate trei sunt pentru orientare. Gradul de mobilitate al structurii mecanice a unui robot industrial este dat de numărul coordonatelor independente necesare pentru definirea neechivocă a poziţiilor tuturor elementelor acestuia. Pentru sistemul mecanic corespunzător unui robot industrial serie, standard, în vederea realizării mişcărilor de poziţionare şi de orientare a mecanismului efector sunt necesare şase grade de mobilitate, dintre care trei sunt asociate lanţului cinematic de poziţionare şi celelalte trei sunt ale lanţului cinematic de orientare. Roboţii industriali construiţi pentru operaţii tehnologice de complexitate redusă, în multe cazuri practice, din considerente de eficienţă efectuează mai puţine mişcări independente asupra dispozitivului efector şi, deci, au mai puţine grade de mobilitate. Mecanismele de poziţionare cu trei grade de mobilitate, în funcţie de tipul coordonatelor care descriu poziţiile şi mişcările diverselor elemente ale, frecvent în practică, definesc structurile de bază de roboţi: în coordonate carteziene (fig.5,a), cilindrice (fig.5,b), sferice (fig.5,c) sau unghiulare (fig. 5.d).
Fig. 5 - Mecanisme de poziţionare de bază în coordonate: a – carteziene, b – cilindrice, c – sferice, a – unghiulatre Mecanismul de orientare, care are ca funcţie principală deplasarea unghiulară a obiectului manipulat în raport cu punctul caracteristic asociat dispozitivului efector idealizat prin dreapta caracteristică, realizează mişcări simple, prin analogie cu mişcările încheieturii mâinii sau ale unei nave (fig.6), de: pronaţie-supinaţie sau ruliu (roll) în jurul axei x, flexie-extensie sau tangaj (pitch) în jurul axei y şi aducţie-abducţie sau giraţie (yaw) cu axa z. Mecanismele de orientare cu unul, două, sau trei grade de mobilitate au la bază numai cuple cinematice de rotaţie, de obicei, ortogonale.
Fig. 6 - Parametrii
mecanismelor de orientare Dispozitivul
de prehensiune sau, mai simplu, efectorul (prehensorul) este
partea finală a sistemului mecanic al robotului industrial (fig.7), care
realizează acţiunea directă asupra obiectului sau sculei de manipulat (v. Anexa.3.1.1).
Acesta este ataşat mecanismului de orientare şi are funcţia de prehensiune
(prindere, menţinere şi eliberare) a obiectului de manipulat (semifabricat,
piesă) sau a dispozitivului tehnologic (cap de sudură, pistol de vopsire,
polizor, instrument de măsurare etc.). În cazul manipulărilor succesive ale
unui obiect sau dispozitiv tehnologic, cu dispozitivul de prehensiune, se
parcurg repetitiv următoarele faze: de centrare (poziţionare), de prindere,
de menţinere, de depunere şi de eliberare.
Fig. 7 – Dispozitive de prehensiune: a – pentru manipularea unui semifabricat/piesă, b – pentru manipularea unui dispozitiv de sudare Acţionarea roboţilor
industriali Mecanismele de ghidare ale roboţilor industriali, pornind de la
lanţurile cinematice cu un număr de cuple conducătoare egal cu gradul de
mobilitate, sunt antrenate de subsisteme de acţionare motoare prin
intermediul unor mecanisme de antrenare (fig.8). Aceste mecanisme, de obicei,
pot fi acţionate de motoare electrice, hidraulice sau pneumatice, liniare sau
rotative.
Fig. 8 – Subsistemele de antrenare Motoarele electrice pentru acţionarea roboţilor
industriali, de obicei, motoare de curent continuu, sincrone sau pas cu pas,
sunt frecvent întâlnite în practică datorită sursei energetice cu
disponibilitate cvasigenerală şi a compatibilităţii mărite cu sistemul de
comandă şi control. Motoarele electrice cu mişcări controlabile, specifice
roboţilor industriali, sunt caracterizate de factori ai puterii specifice
(putere/greutate) micşoraţi şi, de obicei, impun considerarea unor transmisii
mecanice şi mecanisme intermediare (fig.8). Dintre motoarele de curent
continuu, din considerente de randament, gabarit şi eficienţă economică, în
construcţia roboţilor se utilizează frecvent cele cu magneţi permanenţi. Motoarele hidraulice se folosesc, de obicei, pentru
acţionarea directă a cuplelor roboţilor industriali datorită următoarelor
avantaje: raport putere/greutate ridicat, posibilităţi bune de reglare,
structură constructivă simplă, siguranţă în funcţionare bună, rigiditate mărită
datorită compresibilităţii reduse a fluidelor şi întreţinere uşoară. Dar, pe
de altă parte, aceste motoare sunt costisitoare, datorită necesităţii
unităţilor de producere a puterii hidraulice (pompe, acumulatoare etc.), a
echipamentelor de comandă complexe (electroventile, servoventile, servosupape
etc.), precum şi a sistemelor de etanşare şi, în plus, au funcţionări
necorespunzătoare la temperaturi scăzute ale mediului, datorită vâscozităţii
ridicate a fluidului. Motoarele pneumatice se folosesc pentru acţionarea
cuplelor conducătoare şi/sau a mecanismelor de prehensiune datorită
simplităţii instalaţiilor şi valorii mărite a raportului putere/greutate.
Aceste motoare nu sunt preferate pentru sarcini ridicate, din considerente de
securitate, consecinţă a folosirii fluidului motor la presiuni ridicate şi a
necesităţii unor dispozitive de frânare care să asigure oprirea cuplelor
cinematice conducătoare în poziţii relativ bine determinate. Sisteme senzoriale ale
roboţilor industriali Senzorii unui robot industrial pot avea următoarele funcţii: măsurarea
parametrilor robot pentru controlul în buclă închisă, detectarea şi evitarea
coliziunilor, detectarea şi evitarea situaţiilor neprevăzute, găsirea
poziţiilor obiectelor în spaţiul de lucru, corectarea eroroilor induse de
modelele robotului, monitorizarea interacţiunilor cu mediul robot,
inspectarea procesului în care este implicat. De fapt, sistemul senzorial
este compus din subansamble speciale numite traductori (fig. 9) şi
echipamente specifice de prelucrare semnale şi interfaţare care realizează
măsurarea (evaluarea) unor parametri intrinseci ai robotului, legaţi de
deplasarea pe traiectorie, prin senzori interni (de poziţie, viteză,
acceleraţie şi/sau forţă etc.), pe de-o parte, şi a unor parametri legaţi de
starea şi poziţia obiectelor din spaţiul de operare prin senzori externi
(tactili, de proximitate, vizuali etc.), pe de altă parte. De obicei,
traductorul transformă informaţia primară sub forma unui semnal - de tip
mecanic, termic sau chimic - ce caracterizează mediul investigat, într-un
semnal electric analogic sau numeric.
Fig. 9 – Schema
bloc a sistemului senzorial Sisteme de conducere ale
roboţilor industriali Schema
din fig. 10 stă la baza conducerii în buclă inchisă a unui robot
industrial la care corectrea poziţiilor punctelor caracteristice pentru
urmărirea traiectoriei impuse se face având la bază abaterea obţinută prin
compararea parametrilor impuşi (vectori de stare teoretici) cu cei
determinaţi prin sistemul senzorial (vectori de stare măsuraţi). În cazul în
care senzorii pentru determinarea poziţiilor şi mişcărilor cuplelor lipseşte,
deplasarea punctului caracteristic se face fără corecţii, astfel fiind
realizată conducerea în buclă deschisă. Această situaţie se întâmplă
când precizia solicitată în funcţionare este redusă sau atunci când motoarele
de acţionare permit rotirea cu acurateţe la semnale de comandă riguros
definite şi generate (motoare pas cu pas).
Fig. 10 – Schema
sistemului de conducere în buclă închisă Conducerea unui robot
industrial, în cazul general, implică următoarele cerinţe: -
generarea traiectoriilor pentru realizarea unei
mişcări impuse; - comanda şi controlul în buclă închisă (cu feedback); -
conducerea în contact direct cu obstacole în
spaţiul de lucru. Un robot industrial, indiferent de destinaţie, trebuie să execute
mişcări determinate prin deplasarea condiţionată de timp a efectorului pe
curbe definite (traiectorii) în spaţiul de operare. Pentru aceasta este
necesar ca în fiecare punct al traiectoriilor să se cunoască poziţiile,
vitezele şi acceleraţiile mişcării. Parcurgerea traiectoriilor necesare pentru realizarea funcţiei
principale a unui robot industrial implică determinarea preliminară a
coordonatelor robot de poziţie, viteză şi acceleraţie, pentru fiecare cuplă
conducătoare a mecanismului de ghidare. Această operaţie se realizează,
pornind de la parametrii de poziţie şi de mişcare (viteză şi acceleraţie)
asociaţi punctelor caracteristice, prin analiza cinematică inversă.
Traiectoriile pe care se deplasează efectorul, în funcţie de procesul
tehnologic, pot fi cu toate punctele impuse sau numai cu anumite puncte ţintă
impuse. În primul caz, de conducere pe traiectorie continuă, mişcările
simultane corespunzătoare coordonatelor robot au forme şi corelări bine
determinate, spre deosebire de cazul al doilea în care formele pot fi
oarecare, traiectoria obţinută nefiind impusă (conducere punct cu punct). În
afară de trecerea prin toate punctele traiectoriilor sau prin punctele ţintă
de pe acestea, conducerea unui robot industrial trebuie să asigure şi o
mişcare lină, fără frânări şi accelerări bruşte. Deplasarea în aceste
condiţii se asigură dacă pentru coordonatele generalizate se aleg variaţii în
timp (legi de mişcare) cu funcţii de conducere "netede" cu cel
puţin prima derivată continuă. Atingerea punctelor traiectoriilor sau ţintă
respectând funcţiile de conducere se realizează prin compararea continuă,
prin intermediul sistemului de conducere, a valorilor instantanee ale acestor funcţii la momente de timp ti
impuse, cu valorile coordonatelor impuse punctelor respective. În plus, în
cazul conducerii cu luarea în considerare a contactelor (coliziunilor) cu
obstacole din spaţiul de lucru, sistemul de conducere implică şi luarea în
considerare a informaţiilor de la senzorii externi. ... |