|
Buzdugan I.D., Mogan
Gh.L. Proiectarea roboților ficși. Universitatea Transilvania din Braşov |
|
Anexa.1.1.1 Descrierea
produselor de tip robot fix |
|
Definiții Robotul industrial fix, apărut ca rezultat firesc al apariţiei limitelor de flexibilitate şi a gradului de intervenţie a omului în evoluţia maşinilor, utilajelor şi sistemelor tehnologice de prelucrare şi de asamblare cu cerinţe ridicate de productivitate şi calitate, poate fi considerat ca fiind un sistem complex capabil să asiste sau să înlocuiască, parţial sau total, acţiunile operatorului uman în cadrul proceselor de producţie a bunurilor materiale. Pornind de la complexitatea funcţiilor şi a diverselor moduri de acţiune în procesele tehnologice, robotul industrial poate fi definit în diverse feluri. Astfel, conform unor asociaţii de specialitate internaţionale şi naţionale, se întâlnesc multiple definiţii ale noţiunii de robot industrial, printre care: - Manipulator automat, multifuncţional, cu mişcări programabile, proiectat să efectueze operaţii de manipulare a materialelor, pieselor, instrumentelor sau dispozitivelor tehnologice speciale, prin programarea variabilă a mişcărilor, pentru realizarea de diverse funcţii (The Robotics Industry Association, SUA, 1987). - Sistem mecanic cu mişcări flexibile asemănătoare funcţiilor de mişcare ale organismelor vii sau care combină astfel de funcţii de mişcare cu funcţii specifice inteligenţei (recunoaştere, adaptare, învăţare şi/sau raţionament) şi care acţionează ca răspuns la comenzile omului (Standardele Industriale Japoneze). - Dispozitiv reprogramabil proiectat pentru manipularea şi transportul obiectelor şi/sau sculelor sau pentru sarcini performante de execuţie cu mişcări variabile programate (The British Robot Association, Marea Britanie, 1985). - Maşină de manipulare multi-scop controlată automat, reprogramabilă, cu sau fără locomoţie, utilizată în aplicaţiile de automatizări industriale (Swedish Industrial Robot Association). - Maşina automată care conţine un manipulator cu sistem de conducere reprogramabil, pentru îndeplinirea în procesul de producţie a funcţiilor de mişcare şi de conducere, funcţii care îndeplinesc acţiuni asemănătoare cu ale omului pentru deplasarea obiectelor muncii şi/sau a dispozitivelor tehnologice (GOST 25686, URSS). - Manipulator automat, reprogramabil polivalent, capabil să poziţioneze şi să orienteze materiale, piese, scule sau dispozitive specializate în timpul mişcărilor variabile şi programate pentru a executa sarcini variate (NFE61- 100, Franţa). - Manipulator cu comandă automată, cu program flexibil, reprogramabil, multifuncţional, fix sau mobil, destinat utilizării în procesele industriale automatizate (STAS-R-12928/1, România). Manipulatorul, ca
parte principală a structurii mecanice a unui robot industrial, este un
mecanism, de obicei, compus din cuple de rotaţie şi/sau de translaţie, care
are scopul de a deplasa şi orienta obiecte în spaţiu cu diverse grade de
mobilitate. Scopul şi funcţiile unui robot industrial fix La proiectarea, realizarea, dezvoltarea şi
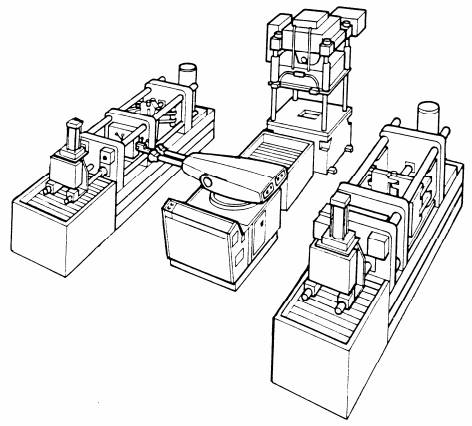
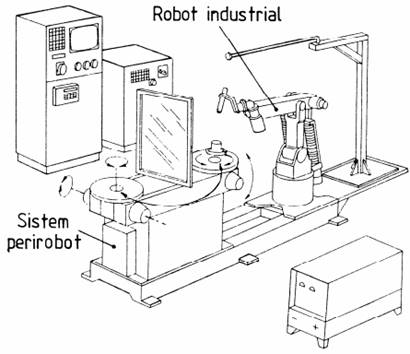
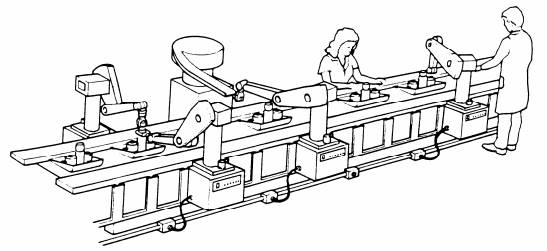
implementarea roboţilor industriali ficși se urmăreşte cu precădere: - mărirea eficienţei acţiunilor externe, realizate de operatorul uman, asupra mediilor tehnologice prin creşterea vitezei şi preciziei de execuţie; - înlocuirea operatorilor umani care execută operaţii simple repetitive sau care lucrează in medii austere (căldură/frig, lumină/întuneric, vibraţii/zgomote etc.) şi nocive (cu radiaţii, poluate etc.). Robotul industrial, în general, operează în mediile tehnologice sub următoarele forme: - manipulare de piese, dispozitive sau scule în poziţii şi orientări diverse (fig.1); - execuţie de operaţii tehnologice de vopsire, de sudare, de polizare, de măsurare etc. (fig.2); - asamblare de produse sau subansamble ale acestora prin aşezarea şi fixarea elementelor componente în poziţiile cerute de funcţionalitate (fig.3).
Fig. 1 - Celulă
flexibilă de turnare cu robot de manipulare
Fig. 2 - Celulă
flexibilă de sudare robotizată
Fig. 3 - Linie
de asamblare parţial robotizată În general, un robot industrial poate realiza
cinci funcţii principale: - de acţiune directă - prin apucare-eliberare şi prin operaţii tehnologice (de sudare, de vopsire, de control etc.) - asupra obiectelor, sculelor, dispozitivelor şi instrumentelor din mediul de operare (de lucru) al robotului; - de manipulare - poziţionare şi orientare - prin deplasarea şi orientarea obiectului manipulat în spaţiul de operare; - de percepţie, prin culegerea de informaţii din mediul de operare, precum şi despre propria stare; - de comunicare, prin schimbul de informaţii dintre robot şi operatorul uman sau cu alţi "parteneri" la procesul tehnologic (maşini de lucru, alţi roboţi industriali, calculatoare etc.); - de decizie, în urma prelucrării tuturor informaţiilor recepţionate, pentru realizarea sarcinilor curente |